Förenklad robotgreppare kan fortfarande hantera komplexa objektmanipulationuppgifter.
17 augusti 2024 inslag
Den här artikeln har granskats enligt Science X:s redaktionella process och policyer. Redaktörer har markerat följande attribut samtidigt som de säkerställer innehållets trovärdighet:
- faktagranskad
- förtryck
- pålitlig källa
- korrekturläs
av Ingrid Fadelli, Tech Xplore
De senaste åren har robotiker världen över designat olika robotgripare som kan plocka upp och manipulera olika typer av föremål. De gripdon som är mest effektiva för att ta itu med verkliga manuella uppgifter, särskilt komplexa objektmanipuleringsuppgifter, är ofta de som inspirerats av mänskliga händer.
Trots deras typiskt goda prestanda förlitar sig många humanoida robothänder på avancerade och ibland dyra mekanismer, såväl som sofistikerade programmeringsverktyg. Detta kan begränsa deras storskaliga användning, eftersom det gör dem opraktiska i utvecklingen av energieffektiva och kostnadseffektiva robotar.
Forskare vid Purdue University och Massachusetts Institute of Technology (MIT) utvecklade nyligen en enklare och ändå till synes lika effektiv robotgripare. Den här griparen, som presenterades i ett papper som lagts ut på arXiv preprint-servern, visade sig effektivt tackla komplicerade objektmanipuleringsuppgifter, trots att den hade färre frihetsgrader (DOF) än gripare inspirerade av mänskliga händer.
"Konventionella hög DOF fingerfärdiga robothänder kan utföra komplexa manipulationsuppgifter i handen men är icke-triviala för programmering/kontroll på grund av deras komplexa mekanismer," sa Yu She, medförfattare till tidningen, till Tech Xplore.
"Däremot är traditionella en DOF-robotgripare med parallellkäft lätta att programmera/styra men är begränsade till att greppa uppgifter och är utmanande att utföra manuell manipulation. Vårt team strävar efter att designa en gripare som överbryggar gapet mellan dessa två typer av gripdon.'
Den nya griparen utvecklad av Hon och hans kollegor har 5 DOF. Även om dess enkla design gör det lättare att styra via programmeringsverktyg, kan griparen fortfarande utföra mänskliga manipulationer i handen, beroende på sensoriska data som registrerats av en integrerad synbaserad taktil sensor.
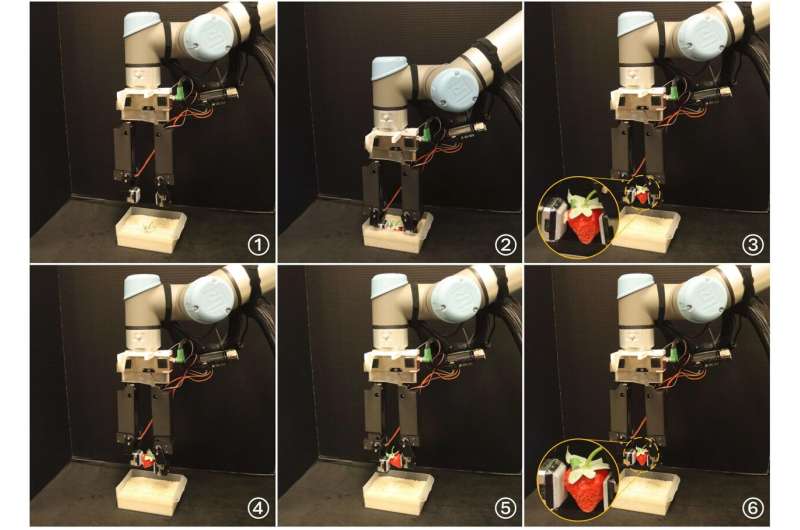
Den nydesignade griparen består i huvudsak av två fingrar fästa på en griparbas. Speciellt monterade teamet också en liten synbaserad taktil sensor överst på griparens vänstra finger.
"Gripbasen ger en DOF för att stänga och öppna griparen," förklarade hon. "Varje finger är utrustad med ett linjärt ställdon och en roterande servomotor, vilket ger totalt fem DOF för griparen. Griparens fingrar är tillverkade av PLA-material med 3D-utskrift. En GelSight mini vision-baserad taktil sensor är monterad på vänster fingertopp och ger information om geometrin, orienteringen och greppkraften hos det gripna föremålet.
Det kännetecknande för griparen som utvecklats av She och hans kollega är att även om dess rörelser lätt kan kontrolleras, kan den fortfarande uppnå en hög nivå av skicklighet under manipulationsuppgifter i handen genom att kombinera dess 5 DOF.
Forskarna utvärderade griparen i en serie initiala verkliga experiment och fann att den nådde utöver de grundläggande manipulationsförmågan hos de flesta enkla gripare med några få DOF. Griparen kan effektivt genomföra två typer av objektmanipulation som kallas singulation och scooping. Det kan till exempel efterlikna den mänskliga rörelsen av att gnugga bort sandpartiklar som sitter fast mellan ett föremåls yta och dess fingrar, en åtgärd som människor kan utföra när de plockar upp snäckor på stranden.
"Vi visar att en gripare med färre frihetsgrader än en humanoid robothand framgångsrikt kan utföra komplicerade manipulationsuppgifter i handen", sa hon. "Denna minskning av komplexitet kan leda till enklare kontrolldesign och mer robusta, kostnadseffektiva, energieffektiva robotlösningar som är lättare att implementera och underhålla."
Robotgriparen som introducerades av detta forskarteam skulle snart kunna utvecklas vidare och tillämpas på andra komplexa objektmanipuleringsuppgifter. Dess underliggande design skulle också kunna inspirera till utvecklingen av andra liknande robotsystem för objektmanipulation som är både kostnadseffektiva och effektiva.
"Vi planerar nu att använda den utvecklade taktila griparen för att utföra mer utmanande manipulationsuppgifter som för närvarande är bortom kapaciteten hos andra robotgripare," tillade hon. "Dessa uppgifter inkluderar, men är inte begränsade till, manipulering av deformerbara linjära objekt."



