Vereenvoudigde robotgrijper kan nog steeds complexe object manipulatie taken aanpakken.
17 augustus 2024
kenmerk
Dit artikel is beoordeeld volgens het redactionele proces en de beleidsregels van Science X. Redacteuren hebben de volgende kenmerken benadrukt terwijl ze de geloofwaardigheid van de inhoud waarborgen:
- feiten gecheckt
- preprint
- betrouwbare bron
- gecorrigeerd
door Ingrid Fadelli, Tech Xplore
De afgelopen jaren hebben robotica-experts over de hele wereld diverse robotgrijpers ontworpen die verschillende soorten objecten kunnen oppakken en manipuleren. De grijpers die het meest effectief zijn in het aanpakken van praktische taken, met name complexe objectmanipulatietaken, zijn vaak geïnspireerd op menselijke handen.
Ondanks hun over het algemeen goede prestaties vertrouwen veel humanoïde robotische handen op geavanceerde en soms dure mechanismen, evenals geavanceerde programmeertools. Dit kan hun grootschalige implementatie beperken, omdat het hen onpraktisch maakt voor de ontwikkeling van energie-efficiënte en kosteneffectieve robots.
Onderzoekers van de Purdue University en het Massachusetts Institute of Technology (MIT) hebben onlangs een eenvoudiger en toch ogenschijnlijk even effectieve robotgrijper ontwikkeld. Deze grijper, gepresenteerd in een paper geplaatst op de arXiv preprint-server, werd gevonden om effectief complexe objectmanipulatietaken aan te kunnen, ondanks dat het minder vrijheidsgraden (DOF) heeft dan grijpers geïnspireerd door menselijke handen.
'Gewone dexterous robotische handen met veel DOF kunnen complexe in-hand manipulatietaken uitvoeren, maar zijn niet triviaal voor programmering/besturing vanwege hun complexe mechanismen,' vertelde Yu She, medeauteur van het paper, aan Tech Xplore.
'In tegenstelling tot dat, zijn traditionele parallelle robotgrijpers met één DOF gemakkelijk te programmeren/besturen, maar zijn beperkt tot grijptaken en zijn uitdagend om in-hand manipulatie uit te voeren. Ons team streeft ernaar om een grijper te ontwerpen die het gat overbrugt tussen deze twee soorten grijpers.'
De nieuwe grijper ontwikkeld door She en zijn collega's heeft 5 DOF. Hoewel het simpele ontwerp het gemakkelijker maakt om te besturen via programmeertools, kan de grijper nog steeds mensachtige in-hand manipulaties uitvoeren, gebaseerd op sensorische gegevens die worden geregistreerd door een geïntegreerde op visie gebaseerde tastzintuigsensor.
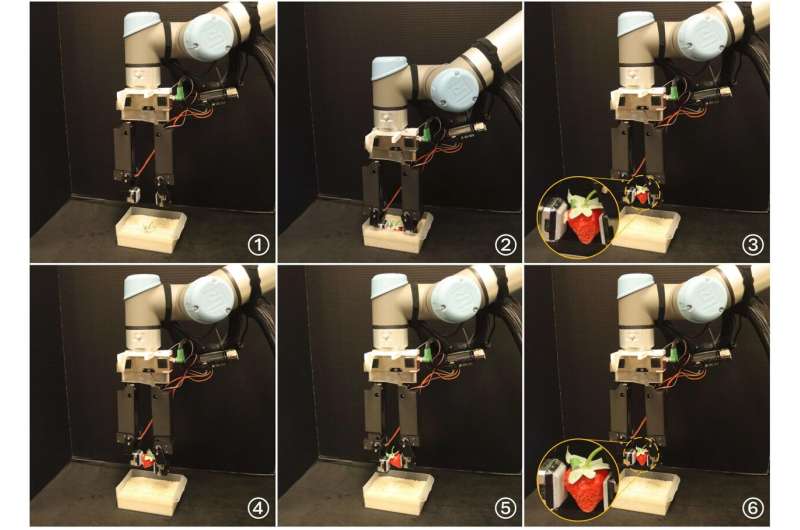
De nieuw ontworpen grijper bestaat in essentie uit twee vingers bevestigd aan een grijperbasis. Opmerkelijk is dat het team ook een kleine op visie gebaseerde tastzintuigsensor bovenop de linker vinger van de grijper heeft gemonteerd.
'De grijperbasis biedt één DOF voor het openen en sluiten van de grijper,' legde She uit. 'Elke vinger is uitgerust met een lineaire actuator en een roterende servomotor, wat een totaal van vijf DOFs van de grijper geeft. De vingers van de grijper zijn vervaardigd uit PLA-materiaal met behulp van 3D-printing. Een GelSight mini op visie gebaseerde tastzintuigsensor is gemonteerd op de linker vingertop, die informatie verstrekt over de geometrie, oriëntatie en gripkracht van het vastgepakte object.'
Het kenmerkende kenmerk van de grijper ontwikkeld door She en zijn collega is dat terwijl de bewegingen ervan gemakkelijk kunnen worden gecontroleerd, het toch een hoog niveau van behendigheid kan bereiken tijdens in-hand manipulatietaken door zijn 5 DOF te combineren.
De onderzoekers hebben de grijper geëvalueerd in een reeks initiële praktijkexperimenten en ontdekten dat deze verder ging dan de basismanipulatievaardigheden van de meeste eenvoudige grijpers met enkele DOF. De grijper kon effectief twee soorten objectmanipulatie voltooien die bekend staan als singulatie en scheppen. Zo kon het bijvoorbeeld de menselijke beweging nabootsen van het wegvegen van zanddeeltjes die vastzitten tussen het oppervlak van een object en zijn vingers, een handeling die mensen zouden uitvoeren bij het oppakken van schelpen op het strand.
'We tonen aan dat een grijper met minder vrijheidsgraden dan een humanoïde robotische hand succesvol complexe in-hand manipulatietaken kan voltooien,' aldus She. 'Deze vermindering in complexiteit kan leiden tot een eenvoudiger ontwerp van controllers en robuustere, kosteneffectieve, energie-efficiënte robotoplossingen die gemakkelijker te implementeren en te onderhouden zijn.'
De door dit onderzoeksteam geïntroduceerde robotgrijper kan binnenkort verder worden ontwikkeld en worden toegepast op andere complexe objectmanipulatietaken. Het onderliggende ontwerp zou ook de ontwikkeling van andere vergelijkbare robotische systemen voor objectmanipulatie kunnen inspireren die zowel kosteneffectief als efficiënt zijn.
'We zijn van plan om de ontwikkelde tastbare grijper te gebruiken om meer uitdagende manipulatietaken uit te voeren die momenteel buiten de capaciteiten van andere robotische grijpers vallen,' voegde She eraan toe. 'Deze taken omvatten, maar zijn niet beperkt tot, de manipulatie van vervormbare lineaire objecten.'
Meer informatie: Yuhao Zhou et al, In-Hand Singulation and Scooping Manipulation with a 5 DOF Tactile Gripper, arXiv (2024). DOI: 10.48550/arxiv.2408.00610
© 2024 Science X Network