Un préhenseur robotique simplifié peut encore gérer des tâches complexes de manipulation d'objets.
17 août 2024 fonctionnalité
Cet article a été examiné selon le processus éditorial et les politiques de Science X. Les éditeurs ont mis en avant les attributs suivants tout en garantissant la crédibilité du contenu:
- vérifié par des faits
- prépublication
- source fiable
- corrigé
par Ingrid Fadelli , Tech Xplore
Au cours des dernières années, des roboticiens du monde entier ont conçu divers préhenseurs robotiques capables de saisir et de manipuler différents types d'objets. Les préhenseurs les plus efficaces pour relever des tâches manuelles du monde réel, en particulier des tâches complexes de manipulation d'objets, sont souvent ceux inspirés par les mains humaines.
Malgré leurs performances généralement bonnes, de nombreuses mains robotiques humanoïdes reposent sur des mécanismes avancés et parfois coûteux, ainsi que sur des outils de programmation sophistiqués. Cela pourrait limiter leur déploiement à grande échelle, car cela les rend impraticables dans le développement de robots énergétiquement efficaces et économiques.
Des chercheurs de l'Université Purdue et du Massachusetts Institute of Technology (MIT) ont récemment développé un préhenseur robotique plus simple mais apparemment tout aussi efficace. Ce préhenseur, présenté dans un article publié sur le serveur de prépublication arXiv, a été trouvé efficace pour relever des tâches complexes de manipulation d'objets, malgré un nombre inférieur de degrés de liberté (DOF) par rapport aux préhenseurs inspirés par les mains humaines.
« Les mains robotiques dextres conventionnelles à haut DOF peuvent exécuter des tâches complexes de manipulation en main mais sont non triviales en matière de programmation/contrôle en raison de leurs mécanismes complexes », a déclaré Yu She, co-auteur de l'article, à Tech Xplore.
« En revanche, les préhenseurs robotiques traditionnels à mâchoires parallèles à un DOF sont faciles à programmer/contrôler mais sont limités aux tâches de préhension et sont difficiles à utiliser pour la manipulation en main. Notre équipe vise à concevoir un préhenseur qui comble l'écart entre ces deux types de préhenseurs. »
Le nouveau préhenseur développé par She et ses collègues a 5 DOF. Bien que sa conception simple le rende plus facile à contrôler via des outils de programmation, le préhenseur peut toujours effectuer des manipulations en main humaine, en s'appuyant sur les données sensorielles enregistrées par un capteur tactile basé sur la vision intégré.
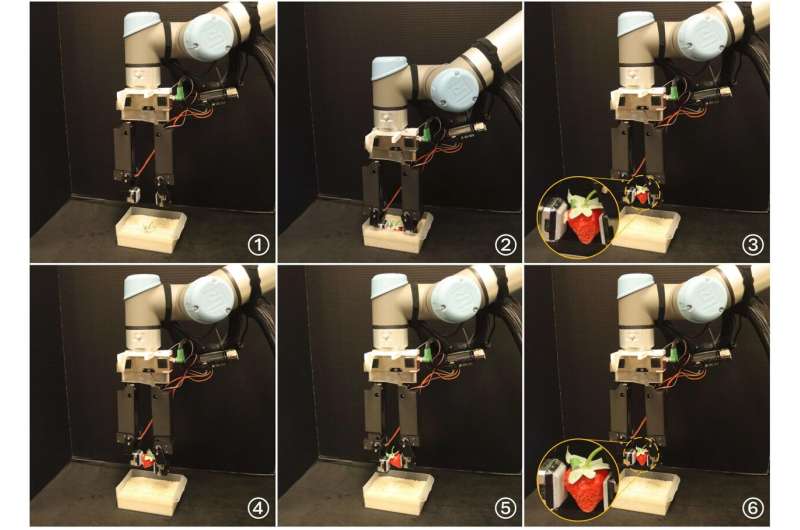
Le préhenseur nouvellement conçu se compose essentiellement de deux doigts fixés à une base de préhenseur. Notamment, l'équipe a également monté un petit capteur tactile basé sur la vision en haut du doigt gauche du préhenseur.
« La base du préhenseur permet un DOF pour l'ouverture et la fermeture du préhenseur », a expliqué She. « Chaque doigt est équipé d'un actionneur linéaire et d'un moteur servo rotatif, fournissant un total de cinq DOF du préhenseur. Les doigts du préhenseur sont fabriqués en matériau PLA à l'aide de l'impression 3D. Un mini capteur tactile basé sur la vision GelSight est monté à l'extrémité du doigt gauche, fournissant des informations sur la géométrie, l'orientation et la force de préhension de l'objet saisi. »
La caractéristique distinctive du préhenseur développé par She et son collègue est que malgré le fait que ses mouvements peuvent être facilement contrôlés, il peut tout de même atteindre un haut niveau de dextérité lors de tâches de manipulation en main en combinant ses 5 DOF.
Les chercheurs ont évalué le préhenseur lors d'une série d'expériences préliminaires en conditions réelles et ont constaté qu'il dépassait les compétences de base de manipulation de la plupart des préhenseurs simples dotés de quelques DOF. Le préhenseur pouvait accomplir efficacement deux types de manipulation d'objets connus sous les noms de singularisation et de ramassage. Par exemple, il pouvait imiter le mouvement humain consistant à frotter les particules de sable coincées entre la surface d'un objet et ses doigts, une action que les humains pourraient effectuer lorsqu'ils ramassent des coquillages sur la plage.
« Nous démontrons qu'un préhenseur avec moins de degrés de liberté qu'une main robotique humanoïde peut accomplir avec succès des tâches complexes de manipulation en main », a déclaré She. « Cette réduction de la complexité peut conduire à une conception de contrôleur plus simple et à des solutions robotiques plus robustes, rentables et économes en énergie, plus faciles à mettre en œuvre et à entretenir. »
Le préhenseur robotique introduit par cette équipe de recherche pourrait bientôt être développé davantage et appliqué à d'autres tâches complexes de manipulation d'objets. Sa conception sous-jacente pourrait également inspirer le développement d'autres systèmes robotiques similaires pour la manipulation d'objets, à la fois rentables et efficaces.
« Nous prévoyons maintenant d'utiliser le préhenseur tactile développé pour accomplir des tâches de manipulation plus difficiles qui dépassent actuellement les capacités des autres préhenseurs robotiques », a ajouté She. « Ces tâches incluent, sans s'y limiter, la manipulation d'objets linéaires déformables. »
Plus d'informations : Yuhao Zhou et al, In-Hand Singulation and Scooping Manipulation with a 5 DOF Tactile Gripper, arXiv (2024). DOI: 10.48550/arxiv.2408.00610
© 2024 Science X Network



