Uproszczony chwytak robotyczny może nadal radzić sobie z złożonymi zadaniami manipulacji obiektami
17 sierpnia 2024 r. artykuł
Artykuł został sprawdzony zgodnie z procesem redakcyjnym i zasadami Science X. Redaktorzy podkreślili następujące atrybuty, zapewniając jednocześnie wiarygodność treści:
- sprawdzone fakty
- przedruk wstępny
- zaufane źródło
- korekta
autorstwa Ingrid Fadelli, Tech Xplore
W ostatnich latach robotycy na całym świecie zaprojektowali różne chwytaki robotyczne, które mogą podnosić i manipulować różnymi typami obiektów. Chwytaki, które są najskuteczniejsze w radzeniu sobie z rzeczywistymi zadaniami manualnymi, w szczególności złożonymi zadaniami manipulacji obiektami, są często inspirowane ludzkimi rękami.
Pomimo ich zazwyczaj dobrej wydajności, wiele humanoidalnych rąk robotycznych opiera się na zaawansowanych i czasami drogich mechanizmach, a także wyrafinowanych narzędziach programistycznych. Może to ograniczyć ich wdrożenie na dużą skalę, ponieważ czyni je niepraktycznymi w rozwoju energooszczędnych i ekonomicznych robotów.
Naukowcy z Purdue University i Massachusetts Institute of Technology (MIT) niedawno opracowali prostszy, a jednocześnie pozornie równie skuteczny chwytak robotyczny. Ten chwytak, zaprezentowany w artykule opublikowanym na serwerze preprintów arXiv, okazał się skuteczny w radzeniu sobie ze skomplikowanymi zadaniami manipulacji obiektami, pomimo posiadania mniejszej liczby stopni swobody (DOF) niż chwytaki inspirowane ludzkimi dłońmi.
„Konwencjonalne zręczne robotyczne dłonie o dużej DOF mogą wykonywać złożone zadania manipulacji dłonią, ale nie są trywialne do programowania/kontroli ze względu na ich złożone mechanizmy” — powiedział Yu She, współautor artykułu, w wywiadzie dla Tech Xplore.
„W przeciwieństwie do tego tradycyjne chwytaki robotyczne o jednej DOF i równoległych szczękach są łatwe do programowania/kontroli, ale ograniczają się do zadań chwytania i są trudne do wykonywania manipulacji dłonią. Nasz zespół ma na celu zaprojektowanie chwytaka, który połączy te dwa typy chwytaków”.
Nowy chwytak opracowany przez She i jego współpracowników ma 5 DOF. Chociaż jego prosta konstrukcja ułatwia sterowanie za pomocą narzędzi programistycznych, chwytak nadal może wykonywać manipulacje dłonią przypominające manipulacje wykonywane przez człowieka, opierając się na danych sensorycznych rejestrowanych przez zintegrowany czujnik dotykowy oparty na wizji.
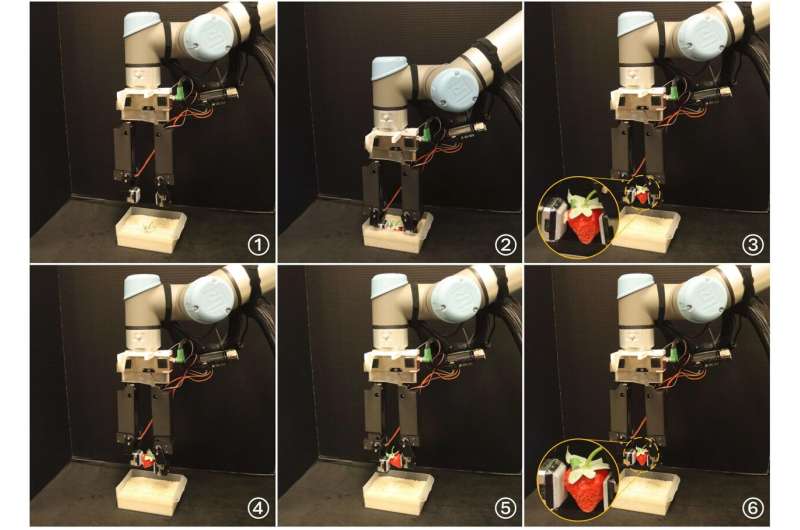
Nowo zaprojektowany chwytak składa się zasadniczo z dwóch palców przymocowanych do podstawy chwytaka. Co ciekawe, zespół zamontował również mały czujnik dotykowy oparty na wizji na górze lewego palca chwytaka.
„Podstawa chwytaka zapewnia jeden stopień swobody do zamykania i otwierania chwytaka” — wyjaśniła. „Każdy palec jest wyposażony w siłownik liniowy i obrotowy serwomotor, zapewniając łącznie pięć stopni swobody chwytaka. Palce chwytaka są wykonane z materiału PLA przy użyciu druku 3D. Miniaturowy czujnik dotykowy oparty na wizji GelSight jest zamontowany na czubku lewego palca, dostarczając informacji o geometrii, orientacji i sile chwytu chwytanego przedmiotu”.
Charakterystyczną cechą chwytaka opracowanego przez She i jego współpracownika jest to, że chociaż jego ruchy można łatwo kontrolować, nadal może on osiągnąć wysoki poziom zręczności podczas zadań manipulacyjnych wykonywanych w dłoni, łącząc swoje 5 stopni swobody.
Naukowcy ocenili chwytak w serii początkowych eksperymentów w świecie rzeczywistym i odkryli, że wykraczał on poza podstawowe umiejętności manipulacyjne większości prostych chwytaków o kilku stopniach swobody. Chwytak mógł skutecznie wykonywać dwa rodzaje manipulacji obiektami, znane jako pojedynczość i nabieranie. Na przykład mógł naśladować ruch człowieka polegający na pocieraniu cząstek piasku utkniętych między powierzchnią obiektu a palcami, czynność, którą ludzie mogliby wykonywać, podnosząc muszle na plaży.
„Wykazujemy, że chwytak o mniejszej liczbie stopni swobody niż humanoidalna ręka robota może pomyślnie wykonywać skomplikowane zadania manipulacyjne w dłoni” — powiedziała. „Ta redukcja złożoności może prowadzić do prostszej konstrukcji kontrolera i bardziej wytrzymałych, ekonomicznych i energooszczędnych rozwiązań robotycznych, które są łatwiejsze do wdrożenia i konserwacji”.
Chwytak robotyczny wprowadzony przez ten zespół badawczy może wkrótce zostać dalej rozwinięty i zastosowany do innych złożonych zadań manipulacji obiektami. Jego podstawowa konstrukcja może również zainspirować rozwój innych podobnych systemów robotycznych do manipulacji obiektami, które są zarówno ekonomiczne, jak i wydajne.
„Planujemy teraz wykorzystać opracowany chwytak dotykowy do realizacji trudniejszych zadań manipulacyjnych, które obecnie wykraczają poza możliwości innych chwytaków robotycznych” – dodała. „Zadania te obejmują między innymi manipulację odkształcalnymi obiektami liniowymi”.



