Il semplice gripper robotico può comunque affrontare compiti complessi di manipolazione degli oggetti
17 agosto 2024
Questo articolo è stato revisionato secondo il processo editoriale e le politiche di Science X. Gli editori hanno evidenziato i seguenti attributi garantendo la credibilità dei contenuti:
- verificato
- preprint
- fonte affidabile
- corretto
di Ingrid Fadelli, Tech Xplore
Negli ultimi anni, i robotici di tutto il mondo hanno progettato vari gripper robotici in grado di raccogliere e manipolare diversi tipi di oggetti. I gripper più efficaci nel affrontare compiti manuali del mondo reale, particolarmente complessi, sono spesso ispirati alle mani umane.
Nonostante le loro prestazioni di solito buone, molte mani robotiche umanoidi si basano su meccanismi avanzati e a volte costosi, nonché su strumenti di programmazione sofisticati. Ciò potrebbe limitare il loro dispiegamento su larga scala, rendendoli impraticabili nello sviluppo di robot energeticamente efficienti ed economici.
Ricercatori dell'Università di Purdue e del Massachusetts Institute of Technology (MIT) hanno recentemente sviluppato un gripper robotico più semplice ma altrettanto efficace. Questo gripper, presentato in un articolo pubblicato sul server di preprint arXiv, è stato trovato efficace nel affrontare compiti di manipolazione di oggetti complessi, nonostante abbia meno gradi di libertà dei gripper ispirati alle mani umane.
'Le tradizionali mani robotiche dexterous ad alto numero di gradi di libertà possono eseguire compiti complessi di manipolazione in mano ma sono non banali da programmare/controllare a causa dei loro complessi meccanismi', ha detto Yu She, co-autore dell'articolo, a Tech Xplore.
'Al contrario, i tradizionali gripper roboticalla pari a un grado di libertà sono facili da programmare/controllare ma sono limitati ai compiti di presa e sono difficili da utilizzare per la manipolazione in mano. Il nostro team mira a progettare un gripper che colmi il divario tra questi due tipi di gripper.'
Il nuovo gripper sviluppato da She e dai suoi colleghi ha 5 gradi di libertà. Pur avendo un design semplice che lo rende più facile da controllare attraverso strumenti di programmazione, il gripper può comunque eseguire manipolazioni in mano simili a quelle umane, affidandosi ai dati sensoriali registrati da un sensore tattile basato sulla visione integrata.
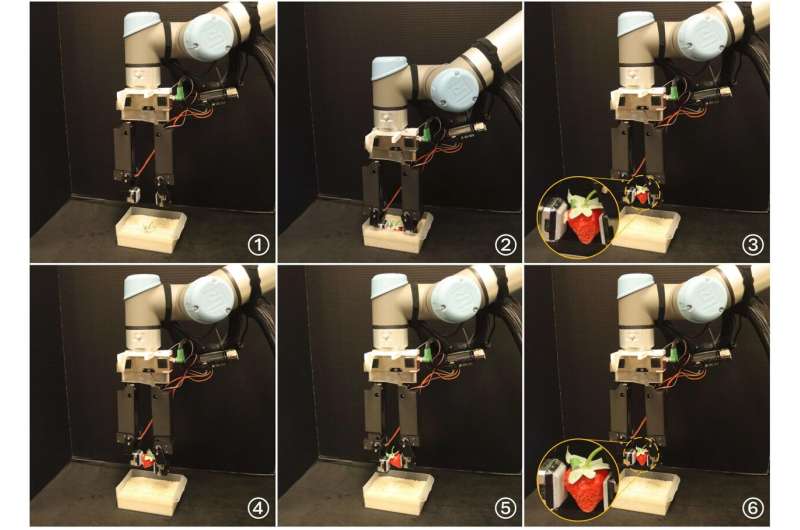
Il gripper di nuova concezione consiste essenzialmente di due dita attaccate ad una base di gripper. In particolare, il team ha montato anche un piccolo sensore tattile basato sulla visione sulla punta del dito sinistro del gripper.
'La base del gripper fornisce un grado di libertà per chiudere e aprire il gripper', ha spiegato She. 'Ogni dito è dotato di un attuatore lineare e di un servomotore rotante, fornendo un totale di cinque gradi di libertà del gripper. I diti del gripper sono fabbricati in materiale PLA usando la stampa 3D. Un sensore tattile basato sulla visione di GelSight è montato alla punta del dito sinistro, fornendo informazioni sulla geometria, orientamento e forza di presa dell'oggetto afferrato.'
La caratteristica distintiva del gripper sviluppato da She e dal suo collega è che mentre i suoi movimenti possono essere facilmente controllati, può ancora raggiungere un alto livello di destrezza durante i compiti di manipolazione in mano combinando i suoi 5 gradi di libertà.
I ricercatori hanno valutato il gripper in una serie di esperimenti reali iniziali e hanno constatato che ha superato le abilità di manipolazione di base dei gripper più semplici con pochi gradi di libertà. Il gripper poteva completare efficacemente due tipi di manipolazione di oggetti noti come singulazione e raccolta. Ad esempio, poteva imitare il movimento umano di strofinare via le particelle di sabbia bloccate tra la superficie dell'oggetto e le sue dita, un'azione che gli esseri umani potrebbero compiere quando raccolgono conchiglie sulla spiaggia.
'Dimostriamo che un gripper con meno gradi di libertà rispetto a una mano robotica umanoide può completare con successo compiti complessi di manipolazione in mano', ha detto She. 'Questa riduzione di complessità può portare a una progettazione di controller più semplice e a soluzioni robotiche più robuste, economicamente efficienti e energeticamente efficienti che sono più facili da implementare e mantenere.'
Il gripper robotico introdotto da questo team di ricerca potrebbe presto essere ulteriormente sviluppato e applicato ad altri compiti complessi di manipolazione di oggetti. Il suo design sottostante potrebbe anche ispirare lo sviluppo di altri sistemi robotici simili per la manipolazione di oggetti che sono sia economicamente convenienti che efficienti.
'Ora pensiamo di utilizzare il gripper tattile sviluppato per completare compiti di manipolazione più impegnativi attualmente al di là delle capacità degli altri gripper robotici', ha aggiunto She. 'Questi compiti includono, ma non sono limitati a, la manipolazione di oggetti lineari deformabili.'
Ulteriori informazioni: Yuhao Zhou et al, In-Hand Singulation and Scooping Manipulation with a 5 DOF Tactile Gripper, arXiv (2024). DOI: 10.48550/arxiv.2408.00610
© 2024 Science X Network



