VereinfachterRoboter-Greifer kann immer noch komplexe Objektmanipulationen bewältigen
17. August 2024 Funktion
Dieser Artikel wurde gemäß dem redaktionellen Prozess und den Richtlinien von Science X überprüft. Die Herausgeber haben die folgenden Attribute hervorgehoben und gleichzeitig die Glaubwürdigkeit des Inhalts sichergestellt:
- Faktencheck
- Preprint
- Vertrauenswürdige Quelle
- Lektorat
Von Ingrid Fadelli, Tech Xplore
In den letzten Jahren haben Roboterexperten weltweit verschiedene Robotergreifer entworfen, die verschiedene Arten von Objekten aufnehmen und manipulieren können. Die Greifer, die am effektivsten bei der Bewältigung realer manueller Aufgaben, insbesondere komplexer Objektmanipulationen, sind oft inspiriert von menschlichen Händen.
Trotz ihrer in der Regel guten Leistung verlassen sich viele humanoide Roboterhände auf fortschrittliche und manchmal teure Mechanismen sowie auf anspruchsvolle Programmierungstools. Dies könnte ihre großflächige Bereitstellung einschränken, da es sie in der Entwicklung energieeffizienter und kostengünstiger Roboter unpraktisch macht.
Forscher der Purdue University und des Massachusetts Institute of Technology (MIT) haben kürzlich einen einfacheren und dennoch scheinbar ebenso effektiven Robotergriff entwickelt. Dieser Greifer, der in einem auf dem arXiv-Preprint-Server veröffentlichten Beitrag vorgestellt wurde, wurde als effektiv bei komplexen Objektmanipulationen erkannt, obwohl er weniger Freiheitsgrade (DOF) aufweist als von menschlichen Händen inspirierte Greifer.
'Konventionelle Roboterhände mit hohem DOF können komplexe In-Hand-Manipulationen durchführen, sind aber aufgrund ihrer komplexen Mechanismen nicht trivial zu programmieren/steuern', sagte Yu She, Mitautor des Beitrags, gegenüber Tech Xplore.
'Im Gegensatz dazu sind traditionelle Robotergreifer mit einem DOF einfach zu programmieren/steuern, aber aufgreifende Aufgaben beschränkt und es ist schwierig, In-Hand-Manipulationen durchzuführen. Unser Team zielt darauf ab, einen Greifer zu entwickeln, der die Kluft zwischen diesen beiden Greifertypen überbrückt.'
Der neue Greifer, den She und seine Kollegen entwickelt haben, hat 5 DOF. Während sein einfaches Design es einfacher macht, über Programmierungstools zu steuern, kann der Greifer dennoch menschenähnliche In-Hand-Manipulationen durchführen, wobei er auf von einem integrierten, visuellen taktilen Sensor aufgezeichneten sensorischen Daten basiert.
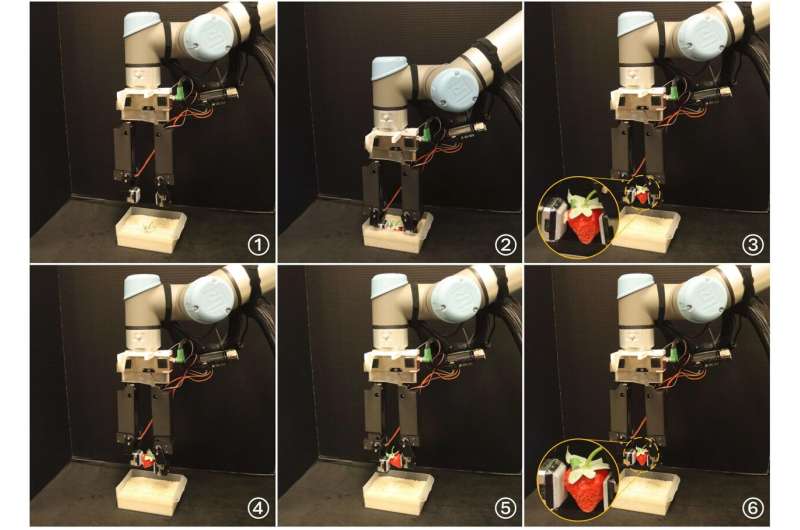
Der neu entwickelte Greifer besteht im Wesentlichen aus zwei Fingern, die an einer Greiferbasis befestigt sind. Beachtenswert ist, dass das Team auch einen kleinen visuellen taktilen Sensor an der Spitze des linken Fingers des Greifers montiert hat.
'Die Greiferbasis bietet einen DOF für das Schließen und Öffnen des Greifers', erklärte She. 'Jeder Finger ist mit einem linearen Aktuator und einem Rotations-Servomotor ausgestattet, die insgesamt fünf DOFs des Greifers bieten. Die Finger des Greifers sind aus PLA-Material mittels 3D-Druck gefertigt. Ein GelSight Mini visueller taktiler Sensor ist am linken Fingerspitze montiert und liefert Informationen über die Geometrie, Ausrichtung und Greifkraft des gegriffenen Objekts.'
Das charakteristische Merkmal des von She und seinem Kollegen entwickelten Greifers ist, dass er zwar einfach gesteuert werden kann, aber dennoch durch die Kombination seiner 5 DOF ein hohes Maß an Geschicklichkeit bei In-Hand-Manipulationen erreichen kann.
Die Forscher bewerteten den Greifer in einer Reihe von ersten realen Experimenten und stellten fest, dass er über die grundlegenden Manipulationsfähigkeiten der meisten einfachen Greifer mit wenigen DOF hinausging. Der Greifer konnte erfolgreich zwei Arten von Objektmanipulationen namens Singulation und Schaufeln durchführen. Beispielsweise konnte er die menschliche Bewegung nachahmen, um Sandkörner, die zwischen der Oberfläche eines Objekts und den Fingern stecken, zu entfernen, eine Aktion, die Menschen möglicherweise ausführen, wenn sie Muscheln am Strand sammeln.
'Wir zeigen, dass ein Greifer mit weniger Freiheitsgraden als eine humanoide Roboterhand erfolgreich komplexe In-Hand-Manipulationen durchführen kann', sagte She. 'Diese Vereinfachung kann zu einfacheren Controller-Designs und zu robusteren, kostengünstigeren und energieeffizienteren Roboterlösungen führen, die einfacher zu implementieren und zu warten sind.'
Der von diesem Forschungsteam eingeführte Robotergreifer könnte bald weiterentwickelt und auf andere komplexe Objektmanipulationsaufgaben angewendet werden. Sein zugrunde liegendes Design könnte auch die Entwicklung anderer ähnlicher robotischer Systeme für die Objektmanipulation inspirieren, die sowohl kostengünstig als auch effizient sind.
'Wir planen nun, den entwickelten taktilen Greifer einzusetzen, um anspruchsvollere Manipulationsaufgaben auszuführen, die derzeit über die Fähigkeiten anderer Robotergreifer hinausgehen', fügte She hinzu. 'Diese Aufgaben umfassen unter anderem die Manipulation von verformbaren linearen Objekten.'
Weitere Informationen: Yuhao Zhou et al, In-Hand Singulation and Scooping Manipulation with a 5 DOF Tactile Gripper, arXiv (2024). DOI: 10.48550/arxiv.2408.00610
© 2024 Science X Network



