El robot simplificado puede manejar tareas de manipulación de objetos complejos
17 de agosto de 2024 función
Este artículo ha sido revisado de acuerdo con el proceso editorial y las políticas de Science X. Los editores han destacado los siguientes atributos mientras aseguran la credibilidad del contenido:
- verificado por hechos
- prueba preliminar
- fuente confiable
- corregido
por Ingrid Fadelli , Tech Xplore
En los últimos años, los robóticos de todo el mundo han diseñado varios agarres robóticos que pueden recoger y manipular diferentes tipos de objetos. Los agarres que son más efectivos para realizar tareas manuales del mundo real, en particular tareas de manipulación de objetos complejos, son a menudo aquellos inspirados en las manos humanas.
A pesar de su típicamente buen rendimiento, muchas manos robóticas humanoides dependen de mecanismos avanzados y a veces costosos, así como de herramientas de programación sofisticadas. Esto podría limitar su despliegue a gran escala, ya que los hace poco prácticos en el desarrollo de robots energéticamente eficientes y rentables.
Investigadores de la Universidad de Purdue y el Instituto de Tecnología de Massachusetts (MIT) desarrollaron recientemente un agarre robótico más simple pero aparentemente igualmente efectivo. Este agarre, presentado en un artículo publicado en el servidor de preimpresión arXiv, resultó ser efectivo para abordar tareas intrincadas de manipulación de objetos, a pesar de tener menos grados de libertad (DOF, por sus siglas en inglés) que los agarres inspirados en las manos humanas.
'Las manos robóticas de alta DOF convencionales pueden realizar tareas complejas de manipulación en la mano, pero son no triviales para la programación/control debido a sus mecanismos complejos', dijo Yu She, coautor del artículo, a Tech Xplore.
'En contraste, los agarres robóticos paralelos de una DOF tradicionales son fáciles para la programación/control pero se limitan a tareas de agarre y son desafiantes de realizar en la manipulación en la mano. Nuestro equipo tiene como objetivo diseñar un agarre que cubra la brecha entre estos dos tipos de agarres.'
El nuevo agarre desarrollado por She y sus colegas tiene 5 DOF. Aunque su diseño simple facilita su control a través de herramientas de programación, el agarre aún puede realizar manipulaciones en la mano similares a las humanas, confiando en datos sensoriales registrados por un sensor táctil integrado basado en visión.
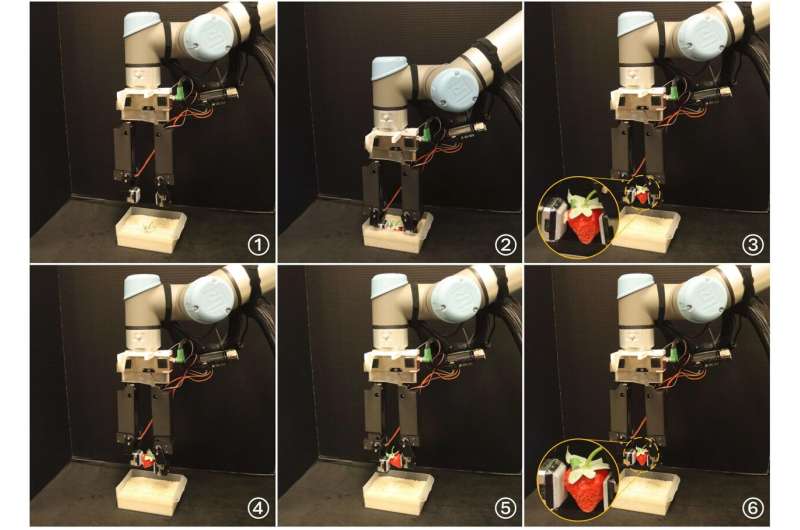
El nuevo agarre diseñado consiste esencialmente en dos dedos unidos a una base de agarre. Notablemente, el equipo también montó un pequeño sensor táctil basado en visión en la parte superior del dedo izquierdo del agarre.
'La base del agarre proporciona una DOF para cerrar y abrir el agarre', explicó She. 'Cada dedo está equipado con un actuador lineal y un motor de servo rotativo, proporcionando un total de cinco DOFs del agarre. Los dedos del agarre están fabricados con material PLA utilizando impresión 3D. Se monta un sensor táctil basado en visión GelSight en la punta del dedo izquierdo, proporcionando información sobre la geometría, orientación y fuerza de agarre del objeto agarrado.'
La característica distintiva del agarre desarrollado por She y su colega es que, aunque sus movimientos pueden ser controlados fácilmente, aún puede lograr un alto nivel de destreza durante las tareas de manipulación en la mano combinando sus 5 DOF.
Los investigadores evaluaron el agarre en una serie de experimentos iniciales en el mundo real y encontraron que superó las habilidades básicas de manipulación de la mayoría de los agarres simples con pocos DOFs. El agarre pudo completar efectivamente dos tipos de manipulación de objetos conocidos como desenmarañado y recogido. Por ejemplo, pudo imitar el movimiento humano de frotar partículas de arena atrapadas entre la superficie de un objeto y sus dedos, una acción que los humanos podrían realizar al recoger conchas en la playa.
'Demostramos que un agarre con menos grados de libertad que una mano robótica humana puede completar con éxito tareas intrincadas de manipulación en la mano', dijo She. 'Esta reducción en complejidad puede llevar a un diseño de controlador más simple y soluciones robóticas más robustas, rentables y energéticamente eficientes que son más fáciles de implementar y mantener.'
El agarre robótico presentado por este equipo de investigación pronto podría ser desarrollado aún más y aplicado a otras tareas complejas de manipulación de objetos. Su diseño subyacente también podría inspirar el desarrollo de otros sistemas robóticos similares para la manipulación de objetos que sean tanto rentables como eficientes.
'Ahora planeamos usar el agarre táctil desarrollado para realizar tareas de manipulación más desafiantes que actualmente están más allá de las capacidades de otros agarres robóticos', agregó She. 'Estas tareas incluyen, pero no se limitan a, la manipulación de objetos lineales deformables'.
Más información: Yuhao Zhou et al, In-Hand Singulation and Scooping Manipulation with a 5 DOF Tactile Gripper, arXiv (2024). DOI: 10.48550/arxiv.2408.00610
© 2024 Science X Network



