Utilizzo di modelli generativi gerarchici per migliorare il controllo motorio dei robot autonomi
10 dicembre 2023
caratteristica
Questo articolo è stato revisionato secondo il processo editoriale e le politiche di Science X.
Gli editori hanno evidenziato i seguenti attributi garantendo la credibilità del contenuto:
- verifica dei fatti
- pubblicazione sottoposta a peer review
- fonte affidabile
- revisione editoriale
di Ingrid Fadelli, Tech Xplore
Per muoversi al meglio nel loro ambiente circostante e affrontare compiti quotidiani, i robot dovrebbero essere in grado di eseguire movimenti complessi, coordinando efficacemente il movimento degli arti individuali. Pertanto, robotici e scienziati informatici hanno cercato di sviluppare tecniche computazionali che possano replicare artificialmente il processo attraverso il quale gli esseri umani pianificano, eseguono e coordinano i movimenti di diverse parti del corpo.
Un gruppo di ricerca con sede presso Intel Labs (Germania), University College London (UCL, Regno Unito) e il VERSES Research Lab (Stati Uniti) si è recentemente impegnato nell'esplorazione del controllo motorio dei robot autonomi utilizzando modelli generativi gerarchici, tecniche computazionali che organizzano le variabili nei dati in diversi livelli o gerarchie, per poi imitare processi specifici.
Il loro studio, pubblicato su Nature Machine Intelligence, dimostra l'efficacia di questi modelli per abilitare il controllo motorio ispirato all'essere umano nei robot autonomi.
"Il nostro recente studio esplora come possiamo trarre ispirazione dall'intelligenza biologica per formalizzare l'apprendimento e il controllo dei robot", ha detto Zhibin (Alex) Li, autore corrispondente dello studio, a Tech Xplore.
"Ciò consente una pianificazione del movimento naturale e un controllo preciso dei movimenti di un robot all'interno di un quadro coerente. Crediamo che l'evoluzione dell'intelligenza motoria non sia una combinazione casuale di diverse abilità. La struttura del nostro cervello visivo, il nostro cervello del linguaggio, il nostro cervello motorio e così via, ha una ragione più profonda e strutturale per cui tale meccanismo per collegare insieme diversi percorsi neurali può funzionare in modo efficace ed efficiente."
Lo studio recente condotto da Assoc Prof Zhibin (Alex) Li e il neuroscienziato di rilievo Prof Karl Friston FMedSci FRSB FRS trae ispirazione dalla ricerca in neuroscienze, in particolare da ciò che si sa attualmente sull'intelligenza biologica e il controllo motorio negli esseri umani. Utilizzando il cervello umano come riferimento, il team ha sviluppato software, algoritmi di apprendimento automatico e di controllo che potrebbero migliorare la capacità dei robot intelligenti autonomi di completare in modo affidabile compiti complessi quotidiani.
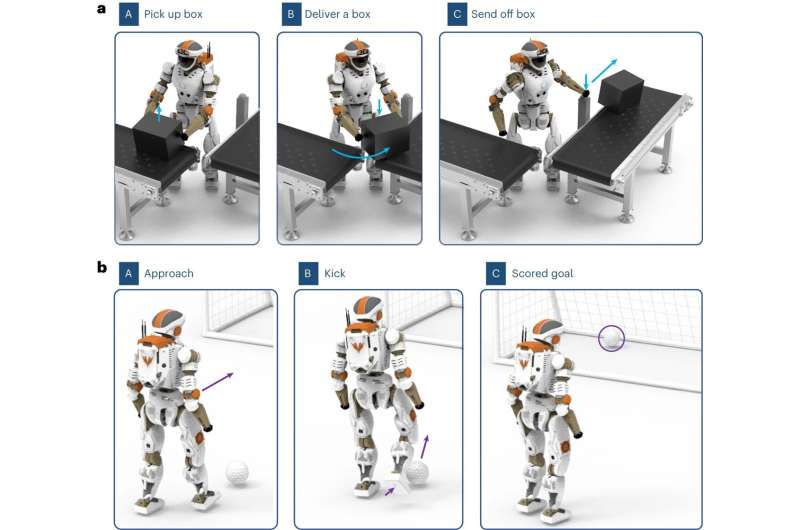
"In questo studio, lo abbiamo dimostrato con la nostra estesa simulazione, in cui un robot umanoide a corpo intero è in grado di trasportare scatole, aprire porte, utilizzare strutture (ad esempio, nastri trasportatori) all'interno di un'ambientazione di un magazzino, giocare a calcio e persino continuare a funzionare anche in caso di danni fisici al corpo del robot", ha detto Li. "Il nostro studio dimostra il potere della natura, dove l'ispirazione su come diversi cortex lavorano insieme nel nostro cervello può aiutare a progettare cervelli robot intelligenti."'
Come altri modelli generativi gerarchici, la tecnica sviluppata da Li e i suoi colleghi funziona organizzando un compito in diversi livelli o gerarchie. In particolare, il modello del team mappa l'obiettivo generale di un compito sull'esecuzione dei movimenti degli arti individuali a diverse scale di tempo.
"I modelli generativi predicono le conseguenze di diverse azioni, contribuendo così a risolvere diversi tipi/livelli di pianificazione e a mappare correttamente diverse azioni del robot, cosa piuttosto difficile e noiosa da fare", ha spiegato Li.
"Ad esempio, trasportare una scatola da un luogo a un altro si mappa naturalmente su un piano globale e grezzo di camminare verso la destinazione, insieme a un monitoraggio più stretto e un controllo preciso dell'equilibrio, nonché al trasporto e al posizionamento delle scatole - tutte queste complesse coordinazioni avvengono naturalmente allo stesso tempo utilizzando il nostro software."
I ricercatori hanno valutato il loro approccio in una serie di simulazioni e hanno scoperto che ha permesso a un robot umanoide di completare autonomamente un compito complesso che comporta una combinazione di azioni, tra cui camminare, afferrare oggetti e manipolarli. In particolare, il robot poteva recuperare e trasportare una scatola aprendo e attraversando una porta e calciando via un pallone.
"Uno dei risultati più significativi del nostro recente lavoro è che trarre ispirazione dalla natura può essere un ottimo punto di partenza", ha detto Li.
'We can get inspiration at the organizational level of resemblance of our brain and guide our design of the robot brain, rather than starting an engineering design from scratch. There is a fair amount of engineering work that have been invented independently from the bio-inspired approaches, and yet, we do not have intelligent robots yet that can do jobs smartly like us, using only little energy, such as consuming bread and water. Instead, nowadays, robots use enormous power and computing to do simple things.'
The initial findings gathered by Li and his colleagues are highly promising, highlighting the potential of hierarchical generative models for transferring human capabilities to robots. Future experiments on a wide range of physical robots could help to further validate these results.
'At this point in human history, we have collectively done a huge amount of work to replicate different kinds of human-level intelligence separately that is equivalent to different parts of the human brain,' Li added. 'Now, we can draw inspiration from the biological brain in terms of structure and organizational level of functionalities regarding how different cortexes coordinate with each other. Then we can design an artificial brain based on how the human brain works at the functional level.'
The recent work by this team of researchers contributes to ongoing efforts of Embodied AI aimed at bringing the capabilities of robots closer to those of humans. Li and his colleagues plan to continue implementing their proposed approach for real robot motor skills for complex tasks and maximizing its societal potential.
'This study leads us to a viable path towards building up AGI (artificial general intelligence) with embodied physical robots and abilities as a new form of productive forces that can bring our civilization towards a brighter future, under good and positive governance from the society and scientific communities,' Li added. 'In our next studies, we will continue working towards fulfilling this ambition.'
© 2023 Science X Network



