Enhancing Motor Control of Autonomous Robots with Hierarchical Generative Models
The date is December 10, 2023.
This article has been evaluated through Science X's editorial process, maintaining content credibility by the following:
- Fact-checked
- Peer-reviewed publication
- Trusted source
- Proofread
The author is Ingrid Fadelli from Tech Xplore.
The article discusses the development of computational techniques that allow robots to move like humans, coordinating the movement of individual limbs to perform complex tasks. Roboticists and computer scientists have been working to artificially replicate this human ability to plan, coordinate, and execute movements of different body parts.
Recently, a research group from Intel Labs (Germany), University College London (UK), and VERSES Research Lab (US) took a step forward in the motor control of autonomous robots. By applying hierarchical generative models, they organized variables in data into different levels to mimic specific processes.
A paper published in Nature Machine Intelligence shows the effectiveness of these models in facilitating human-like motor control in autonomous robots.
Zhibin (Alex) Li, who authored the paper, explained that the approach aimed to draw inspiration from biological intelligence for robot learning and control. Li believes the evolution of motor intelligence is not a random mix of abilities, and the neural pathways in different parts of the brain can effectively work together.
Distinguished neuroscientist Prof. Karl Friston and Assoc Prof Zhibin Li took cues from neuroscience research to understand more about biological intelligence and motor control in humans. With the human brain as their model, they developed machine learning and control algorithms that could enhance the autonomous function of smart robots.
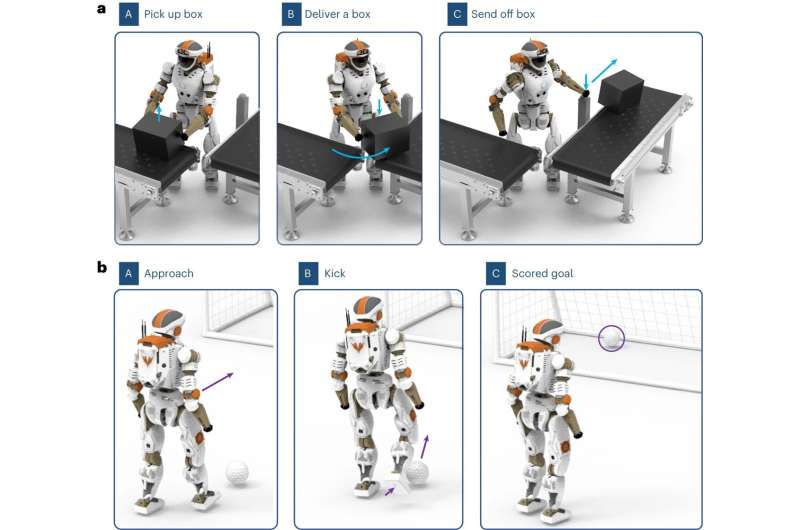
Their work demonstrated on a full-body humanoid robot to undertake various tasks within a warehouse setting. Similarly, the robot was also able to adapt to physical damage.
Li's technique, like other hierarchical generative models, breaks down a task into different levels. The model then maps the overall task goal across different individual limb motions, predicting the outcomes of different actions. This crucial function assists in planning and guides the robot's correct actions.
The researchers tested the approach through various simulations. The model successfully allowed a humanoid robot to undertake a complex task involving walking, grasping, and manipulating objects.
Li emphasized that taking inspiration from nature could be a very effective starting point for such work.
'We can get inspiration at the organizational level of resemblance of our brain and guide our design of the robot brain, rather than starting an engineering design from scratch. There is a fair amount of engineering work that have been invented independently from the bio-inspired approaches, and yet, we do not have intelligent robots yet that can do jobs smartly like us, using only little energy, such as consuming bread and water. Instead, nowadays, robots use enormous power and computing to do simple things.'
The initial findings gathered by Li and his colleagues are highly promising, highlighting the potential of hierarchical generative models for transferring human capabilities to robots. Future experiments on a wide range of physical robots could help to further validate these results.
'At this point in human history, we have collectively done a huge amount of work to replicate different kinds of human-level intelligence separately that is equivalent to different parts of the human brain,' Li added. 'Now, we can draw inspiration from the biological brain in terms of structure and organizational level of functionalities regarding how different cortexes coordinate with each other. Then we can design an artificial brain based on how the human brain works at the functional level.'
The recent work by this team of researchers contributes to ongoing efforts of Embodied AI aimed at bringing the capabilities of robots closer to those of humans. Li and his colleagues plan to continue implementing their proposed approach for real robot motor skills for complex tasks and maximizing its societal potential.
'This study leads us to a viable path towards building up AGI (artificial general intelligence) with embodied physical robots and abilities as a new form of productive forces that can bring our civilization towards a brighter future, under good and positive governance from the society and scientific communities,' Li added. 'In our next studies, we will continue working towards fulfilling this ambition.'
© 2023 Science X Network