Utilisation de modèles génératifs hiérarchiques pour renforcer le contrôle moteur des robots autonomes.
10 décembre 2023
Ce article a été examiné conformément au processus éditorial et aux politiques de Science X. Les rédacteurs ont souligné les attributs suivants tout en veillant à la crédibilité du contenu :
- vérification des faits
- publication examinée par des pairs
- source de confiance
- lecture et correction
par Ingrid Fadelli, Tech Xplore.
Pour pouvoir se déplacer efficacement dans leur environnement et accomplir des tâches quotidiennes, les robots doivent être capables d'effectuer des mouvements complexes en coordonnant efficacement les mouvements de leurs membres. Les roboticiens et les informaticiens travaillent donc à développer des techniques informatiques capables de reproduire artificiellement le processus par lequel les humains planifient, exécutent et coordonnent les mouvements de différentes parties du corps.
Un groupe de recherche basé aux Intel Labs (Allemagne), à l'University College London (UCL, Royaume-Uni) et au VERSES Research Lab (États-Unis) s'est récemment lancé dans l'exploration du contrôle moteur des robots autonomes à l'aide de modèles génératifs hiérarchiques, des techniques informatiques qui organisent les variables des données en différents niveaux ou hiérarchies, afin de reproduire ensuite des processus spécifiques.
Leur article, publié dans Nature Machine Intelligence, démontre l'efficacité de ces modèles pour permettre un contrôle moteur inspiré des humains chez les robots autonomes.
"Notre dernier article explore comment nous pouvons nous inspirer de l'intelligence biologique pour formaliser l'apprentissage et le contrôle des robots", a déclaré Zhibin (Alex) Li, auteur correspondant de l'article, à Tech Xplore.
"Cela permet une planification de mouvements naturelle et un contrôle précis des mouvements d'un robot dans un cadre cohérent. Nous pensons que l'évolution de l'intelligence motrice n'est pas une combinaison aléatoire de différentes capacités. La structure de notre cortex visuel, de notre cortex langagier, de notre cortex moteur, etc., a une raison plus profonde et structurelle pour expliquer pourquoi un mécanisme permettant de connecter différents chemins neuronaux ensemble peut fonctionner de manière efficace et efficiente."
L'étude récente du Prof. Associé Zhibin (Alex) Li et du neuroscientifique distingué Prof. Karl Friston FMedSci FRSB FRS s'inspire de la recherche en neurosciences, notamment de ce que l'on sait actuellement sur l'intelligence biologique et le contrôle moteur chez les humains. En utilisant le cerveau humain comme référence, l'équipe a développé des logiciels, des algorithmes d'apprentissage automatique et de contrôle qui pourraient améliorer les capacités des robots autonomes à accomplir de manière fiable des tâches complexes au quotidien.
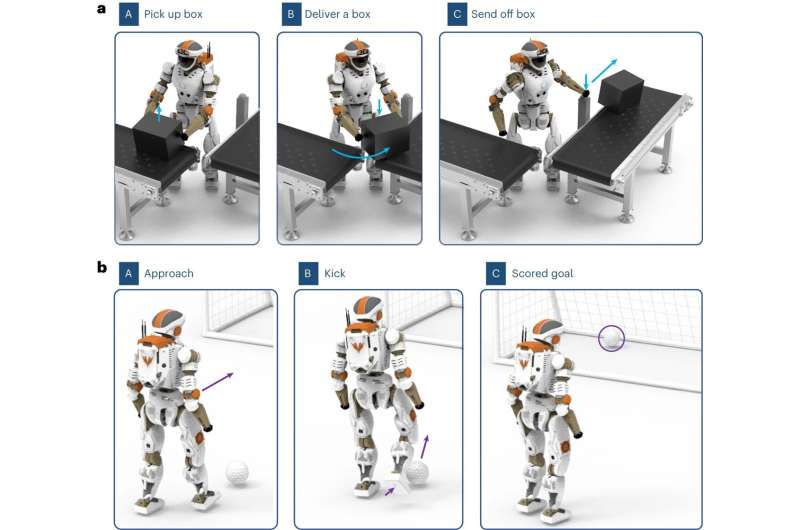
"Dans cet article, nous l'avons démontré à travers nos nombreuses simulations, où un robot humanoïde à corps entier est capable de transporter des boîtes, d'ouvrir des portes, de faire fonctionner des installations (par exemple des convoyeurs) dans un entrepôt, de jouer au football, et même de continuer son activité malgré des dommages physiques sur son corps", a déclaré Li. "Notre étude démontre la puissance de la nature, où l'inspiration de la façon dont les différents cortèxes fonctionnent ensemble dans notre cerveau peut aider à concevoir des cerveaux de robots intelligents."
Tout comme d'autres modèles génératifs hiérarchiques, la technique développée par Li et ses collègues fonctionne en organisant une tâche en différents niveaux ou hiérarchies. Plus précisément, le modèle de l'équipe associe l'objectif global d'une tâche à l'exécution de mouvements individuels des membres à différentes échelles de temps.
"Les modèles génératifs prédisent les conséquences de différentes actions, ce qui aide à résoudre les différents types/niveaux de planification et à cartographier correctement les différentes actions du robot, ce qui est assez difficile et fastidieux à faire", a expliqué Li.
"Par exemple, transporter une boîte d'un endroit à un autre se traduira naturellement par un plan global et grossier consistant à se diriger vers la destination, accompagné d'un suivi plus précis et d'un contrôle fin de l'équilibre, ainsi que du transport et du placement des boîtes. Toute cette coordination complexe se fera naturellement en même temps grâce à notre logiciel."
Les chercheurs ont évalué leur approche lors d'une série de simulations et ont constaté qu'elle permettait à un robot humanoïde d'accomplir de manière autonome une tâche complexe qui nécessite une combinaison d'actions, telles que marcher, saisir des objets et les manipuler. Plus précisément, le robot pouvait récupérer et transporter une boîte tout en ouvrant et en franchissant une porte, et en poussant un ballon.
"L'une des découvertes les plus remarquables de notre travail récent est que s'inspirer de la nature peut être un très bon point de départ", a déclaré Li.
'We can get inspiration at the organizational level of resemblance of our brain and guide our design of the robot brain, rather than starting an engineering design from scratch. There is a fair amount of engineering work that have been invented independently from the bio-inspired approaches, and yet, we do not have intelligent robots yet that can do jobs smartly like us, using only little energy, such as consuming bread and water. Instead, nowadays, robots use enormous power and computing to do simple things.'
The initial findings gathered by Li and his colleagues are highly promising, highlighting the potential of hierarchical generative models for transferring human capabilities to robots. Future experiments on a wide range of physical robots could help to further validate these results.
'At this point in human history, we have collectively done a huge amount of work to replicate different kinds of human-level intelligence separately that is equivalent to different parts of the human brain,' Li added. 'Now, we can draw inspiration from the biological brain in terms of structure and organizational level of functionalities regarding how different cortexes coordinate with each other. Then we can design an artificial brain based on how the human brain works at the functional level.'
The recent work by this team of researchers contributes to ongoing efforts of Embodied AI aimed at bringing the capabilities of robots closer to those of humans. Li and his colleagues plan to continue implementing their proposed approach for real robot motor skills for complex tasks and maximizing its societal potential.
'This study leads us to a viable path towards building up AGI (artificial general intelligence) with embodied physical robots and abilities as a new form of productive forces that can bring our civilization towards a brighter future, under good and positive governance from the society and scientific communities,' Li added. 'In our next studies, we will continue working towards fulfilling this ambition.'
© 2023 Science X Network



