Mit hierarchischen generativen Modellen zur Verbesserung der Motorsteuerung autonomer Roboter.
10. Dezember 2023
Dieser Artikel wurde gemäß dem redaktionellen Prozess und den Richtlinien von Science X überprüft. Die Herausgeber haben folgende Merkmale hervorgehoben, um die Glaubwürdigkeit des Inhalts zu gewährleisten:
- Fact-Checking
- Begutachtete Veröffentlichung
- Vertrauenswürdige Quelle
Korrekturgelesen von Ingrid Fadelli, Tech Xplore
Um sich in ihrer Umgebung zu bewegen und alltägliche Aufgaben zu bewältigen, sollten Roboter in der Lage sein, komplexe Bewegungen auszuführen und die Bewegung einzelner Gliedmaßen effektiv zu koordinieren. Daher haben Robotiker und Informatiker versucht, rechnerische Techniken zu entwickeln, die den Prozess, durch den Menschen die Bewegungen verschiedener Körperteile planen, ausführen und koordinieren, künstlich nachahmen können.
Eine Forschungsgruppe, ansässig bei Intel Labs (Deutschland), dem University College London (UCL, Großbritannien) und dem VERSES Research Lab (USA), hat kürzlich untersucht, wie die Motorsteuerung autonomer Roboter mithilfe hierarchischer generativer Modelle verbessert werden kann. Hierarchische generative Modelle sind rechnerische Techniken, die Variablen in Daten in verschiedene Ebenen oder Hierarchien organisieren, um bestimmte Prozesse nachzubilden.
In ihrer in Nature Machine Intelligence veröffentlichten Arbeit zeigen sie die Wirksamkeit dieser Modelle bei der Ermöglichung einer vom Menschen inspirierten Motorsteuerung bei autonomen Robotern.
'Unsere aktuelle Arbeit untersucht, wie wir uns von biologischer Intelligenz inspirieren lassen können, um das Lernen und die Steuerung von Robotern zu formalisieren', sagte Zhibin (Alex) Li, Korrespondenzautor der Arbeit, gegenüber Tech Xplore.
'Dies ermöglicht eine natürliche Bewegungsplanung und präzise Kontrolle der Bewegungen eines Roboters innerhalb eines kohärenten Rahmens. Wir glauben, dass die Entwicklung motorischer Intelligenz keine zufällige Kombination verschiedener Fähigkeiten ist. Die Struktur unserer Sehrinde, Sprachrinde, Motorrinde usw. hat einen tieferen und strukturbezogenen Grund, warum ein solcher Mechanismus zur Verbindung unterschiedlicher neuronaler Pfade effektiv und effizient funktionieren kann.'
Die jüngste Studie von Assoc Prof Zhibin (Alex) Li und dem renommierten Neurowissenschaftler Prof Karl Friston FMedSci FRSB FRS greift auf Erkenntnisse aus der Neurowissenschaft zurück, insbesondere auf das, was derzeit über biologische Intelligenz und Motorsteuerung beim Menschen bekannt ist. Mit dem menschlichen Gehirn als Referenz entwickelte das Team Software, maschinelles Lernen und Steuerungsalgorithmen, die die Fähigkeit autonomer intelligenter Roboter verbessern sollen, komplexe tägliche Aufgaben zuverlässig zu erledigen.
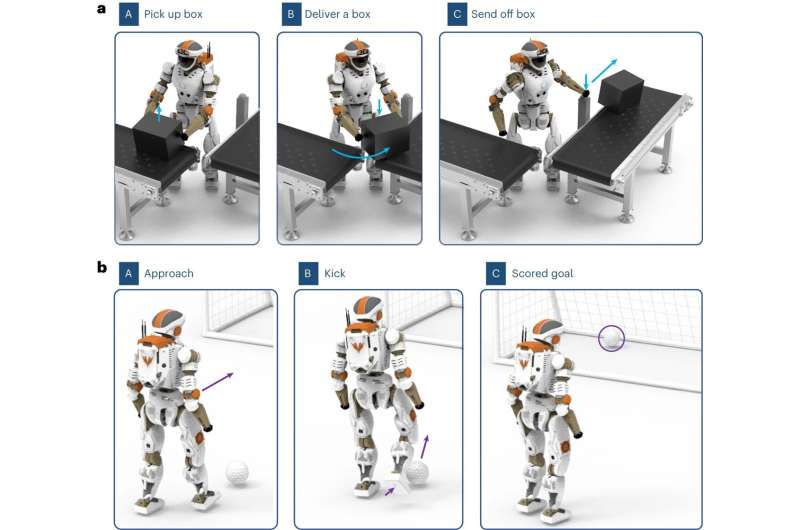
'In diesem Artikel haben wir dies mit unserer umfangreichen Simulation demonstriert, bei der ein Ganzkörper-Humanoidroboter in der Lage ist, Kisten zu transportieren, Türen zu öffnen, Einrichtungen (z. B. Förderbänder) in einer Lagerumgebung zu bedienen, Fußball zu spielen und sogar bei physischen Schäden am Roboter weiterhin zu funktionieren', sagte Li. 'Unsere Studie zeigt die Kraft der Natur, bei der die Inspiration dafür, wie verschiedene Rinden in unserem Gehirn zusammenarbeiten, bei der Gestaltung intelligenter Roboterhirne helfen kann.'
Wie andere hierarchische generative Modelle organisiert sich die von Li und seinen Kollegen entwickelte Technik, indem sie eine Aufgabe in verschiedene Ebenen oder Hierarchien unterteilt. Genauer gesagt, ordnet das Modell des Teams das übergeordnete Ziel einer Aufgabe der Ausführung individueller Bewegungen von Gliedmaßen in verschiedenen Zeitskalen zu.
'Die generativen Modelle sagen die Folgen unterschiedlicher Aktionen voraus und helfen so bei der Lösung verschiedener Arten/Ebenen der Planung und der korrekten Zuordnung unterschiedlicher Roboteraktionen, was recht schwierig und mühsam ist', erklärte Li.
'Beispielsweise wird das Tragen einer Kiste von einem Ort zum anderen natürlich einem globalen und groben Plan des Gehens zum Zielort zugeordnet, zusammen mit einer genaueren Überwachung und feineren Kontrolle des Gleichgewichts sowie dem Tragen und Platzieren der Kisten. Diese komplexe Koordination erfolgt mit unserer Software gleichzeitig.'
Die Forscher evaluieren ihren Ansatz in einer Reihe von Simulationen und stellten fest, dass er es einem humanoiden Roboter ermöglichte, autonom eine komplexe Aufgabe zu erledigen, die eine Kombination von Aktionen wie Gehen, Greifen von Objekten und Manipulieren beinhaltet. Konkret konnte der Roboter eine Schachtel abholen und transportieren, während er eine Tür öffnete, hindurchging und einen Fußball wegkickte.
'Eins der bemerkenswertesten Ergebnisse unserer aktuellen Arbeit ist, dass die Inspiration aus der Natur ein sehr guter Ausgangspunkt sein kann', sagte Li.
'We can get inspiration at the organizational level of resemblance of our brain and guide our design of the robot brain, rather than starting an engineering design from scratch. There is a fair amount of engineering work that have been invented independently from the bio-inspired approaches, and yet, we do not have intelligent robots yet that can do jobs smartly like us, using only little energy, such as consuming bread and water. Instead, nowadays, robots use enormous power and computing to do simple things.'
The initial findings gathered by Li and his colleagues are highly promising, highlighting the potential of hierarchical generative models for transferring human capabilities to robots. Future experiments on a wide range of physical robots could help to further validate these results.
'At this point in human history, we have collectively done a huge amount of work to replicate different kinds of human-level intelligence separately that is equivalent to different parts of the human brain,' Li added. 'Now, we can draw inspiration from the biological brain in terms of structure and organizational level of functionalities regarding how different cortexes coordinate with each other. Then we can design an artificial brain based on how the human brain works at the functional level.'
The recent work by this team of researchers contributes to ongoing efforts of Embodied AI aimed at bringing the capabilities of robots closer to those of humans. Li and his colleagues plan to continue implementing their proposed approach for real robot motor skills for complex tasks and maximizing its societal potential.
'This study leads us to a viable path towards building up AGI (artificial general intelligence) with embodied physical robots and abilities as a new form of productive forces that can bring our civilization towards a brighter future, under good and positive governance from the society and scientific communities,' Li added. 'In our next studies, we will continue working towards fulfilling this ambition.'
© 2023 Science X Network