Usando modelos generativos jerárquicos para mejorar el control motor de robots autónomos.
10 de diciembre de 2023 característica
Este artículo ha sido revisado de acuerdo con el proceso editorial y las políticas de Science X. Los editores han destacado las siguientes características mientras garantizan la credibilidad del contenido:
- verificado por hechos
- publicación revisada por pares
- fuente confiable
- corregido
por Ingrid Fadelli, Tech Xplore
Para moverse mejor en su entorno y abordar tareas diarias, los robots deben ser capaces de realizar movimientos complejos, coordinando eficazmente el movimiento de las extremidades individuales. Por lo tanto, los robóticos y los científicos de la computación han estado tratando de desarrollar técnicas computacionales que puedan replicar artificialmente el proceso a través del cual los humanos planifican, ejecutan y coordinan los movimientos de las diferentes partes del cuerpo.
Recientemente, un grupo de investigación basado en Intel Labs (Alemania), University College London (UCL, Reino Unido) y VERSES Research Lab (EE. UU.) se propuso explorar el control motor de los robots autónomos utilizando modelos generativos jerárquicos, técnicas computacionales que organizan las variables de los datos en diferentes niveles o jerarquías, para luego imitar procesos específicos.
Su artículo, publicado en Nature Machine Intelligence, demuestra la eficacia de estos modelos para permitir el control motor inspirado en el ser humano en los robots autónomos.
'Nuestro reciente artículo explora cómo podemos inspirarnos en la inteligencia biológica para formalizar el aprendizaje y control de los robots', dijo Zhibin (Alex) Li, autor correspondiente del artículo, a Tech Xplore.
'Esto permite la planificación de movimientos naturales y el control preciso de los movimientos de un robot dentro de un marco coherente. Creemos que la evolución de la inteligencia motora no es una combinación aleatoria de diferentes habilidades. La estructura de nuestra corteza visual, corteza del lenguaje, corteza motora, etc., tiene una razón más profunda y estructural para que tal mecanismo de conexión de diferentes caminos neuronales pueda funcionar de manera efectiva y eficiente.'
El reciente estudio del profesor asociado Zhibin (Alex) Li y del destacado neurocientífico profesor Karl Friston FMedSci FRSB FRS se inspira en la investigacion de la neurociencia, específicamente en lo que se conoce actualmente sobre la inteligencia biológica y el control motor en los seres humanos. Utilizando el cerebro humano como referencia, el equipo desarrolló software, aprendizaje automático y algoritmos de control que podrían mejorar la capacidad de los robots autónomos inteligentes para completar tareas diarias complejas de manera confiable.
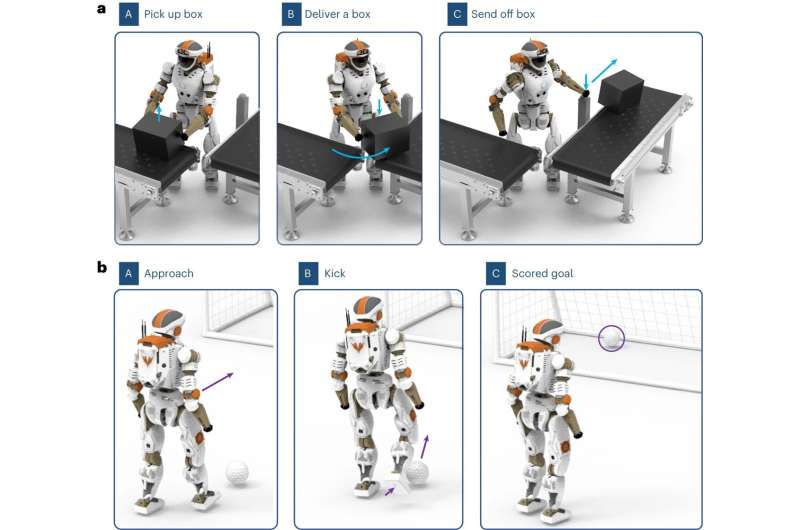
'En este artículo, lo hemos demostrado con nuestras extensas simulaciones, donde un robot humanoide de cuerpo completo puede transportar cajas, abrir puertas, operar instalaciones (por ejemplo, cintas transportadoras) dentro de un entorno de almacén, jugar al fútbol e incluso continuar operando aunque se produzca daño físico en el cuerpo del robot', dijo Li. 'Nuestro estudio demuestra el poder de la naturaleza, donde la inspiración sobre cómo funcionan juntas diferentes cortezas en nuestro cerebro puede ayudar al diseño de cerebros de robots inteligentes'.
Al igual que otros modelos generativos jerárquicos, la técnica desarrollada por Li y sus colegas funciona organizando una tarea en diferentes niveles o jerarquías. Específicamente, el modelo del equipo mapea el objetivo general de una tarea en la ejecución de movimientos de las extremidades individuales en diferentes escalas de tiempo.
'Los modelos generativos predicen las consecuencias de diferentes acciones, lo que ayuda a resolver diferentes tipos/niveles de planificación y mapear correctamente diferentes acciones de los robots, lo cual es bastante difícil y tedioso de hacer', explicó Li.
'Por ejemplo, llevar una caja de un lugar a otro se mapeará naturalmente a un plan global y general de caminar hacia el destino, junto con un monitoreo más cercano y un control fino del equilibrio, así como llevar y colocar las cajas; toda esta compleja coordinación ocurrirá naturalmente al mismo tiempo utilizando nuestro software'.
Los investigadores evaluaron su enfoque en una serie de simulaciones y encontraron que permitía que un robot humanoide completara autonomamente una tarea compleja que implica una combinación de acciones, incluyendo caminar, agarrar objetos y manipularlos. Específicamente, el robot podía recuperar y transportar una caja mientras abría y atravesaba una puerta y pateaba una pelota.
'Uno de los hallazgos más notables de nuestro trabajo reciente es que tomar inspiración de la naturaleza puede ser un muy buen punto de partida', dijo Li.
'We can get inspiration at the organizational level of resemblance of our brain and guide our design of the robot brain, rather than starting an engineering design from scratch. There is a fair amount of engineering work that have been invented independently from the bio-inspired approaches, and yet, we do not have intelligent robots yet that can do jobs smartly like us, using only little energy, such as consuming bread and water. Instead, nowadays, robots use enormous power and computing to do simple things.'
The initial findings gathered by Li and his colleagues are highly promising, highlighting the potential of hierarchical generative models for transferring human capabilities to robots. Future experiments on a wide range of physical robots could help to further validate these results.
'At this point in human history, we have collectively done a huge amount of work to replicate different kinds of human-level intelligence separately that is equivalent to different parts of the human brain,' Li added. 'Now, we can draw inspiration from the biological brain in terms of structure and organizational level of functionalities regarding how different cortexes coordinate with each other. Then we can design an artificial brain based on how the human brain works at the functional level.'
The recent work by this team of researchers contributes to ongoing efforts of Embodied AI aimed at bringing the capabilities of robots closer to those of humans. Li and his colleagues plan to continue implementing their proposed approach for real robot motor skills for complex tasks and maximizing its societal potential.
'This study leads us to a viable path towards building up AGI (artificial general intelligence) with embodied physical robots and abilities as a new form of productive forces that can bring our civilization towards a brighter future, under good and positive governance from the society and scientific communities,' Li added. 'In our next studies, we will continue working towards fulfilling this ambition.'
© 2023 Science X Network



