Nuovo framework consente movimenti agili simili agli animali nei robot a quattro zampe
13 luglio 2024 funzionalità
Questo articolo è stato revisionato secondo il processo editoriale e le politiche di Science X. Gli editori hanno evidenziato i seguenti attributi garantendo la credibilità dei contenuti:
- verificato dai fatti
- pubblicazione revisionata dai pari
- fonte affidabile
- corretto
di Ingrid Fadelli, Tech Xplore
Gli animali a quattro zampe sono innatamente capaci di movimenti agili e adattabili, che permettono loro di muoversi su una vasta gamma di terreni. Negli ultimi decenni, i robotici di tutto il mondo hanno cercato di riprodurre efficacemente questi movimenti nei robot quadrupedi (cioè a quattro zampe).
I modelli computazionali addestrati tramite apprendimento per rinforzo si sono rivelati particolarmente promettenti per abilitare la locomozione agile nei robot quadrupedi. Tuttavia, questi modelli vengono generalmente addestrati in ambienti simulati e talvolta la loro performance declina quando vengono applicati a robot reali in ambienti reali.
Approcci alternativi per realizzare la locomozione agile nei quadrupedi utilizzano filmati di animali in movimento raccolti da sensori di movimento e telecamere come dimostrazioni, che vengono utilizzati per addestrare i controller (cioè algoritmi per eseguire i movimenti dei robot). Questo approccio, chiamato 'apprendimento per imitazione', è stato in grado di riprodurre movimenti simili ad animali in alcuni robot quadrupedi.
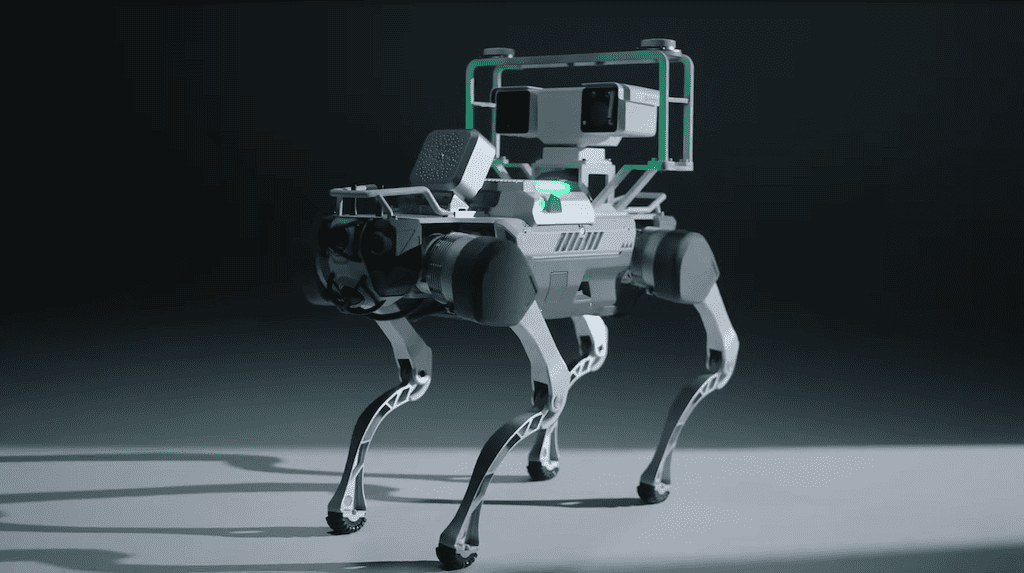
I ricercatori di Tencent Robotics X in Cina hanno recentemente introdotto un nuovo schema gerarchico che potrebbe facilitare l'esecuzione di movimenti agili simili ad animali nei robot a quattro zampe. Questo schema, presentato in un paper pubblicato su Nature Machine Intelligence, è stato inizialmente applicato a un robot quadrupede chiamato MAX, ottenendo risultati molto promettenti.
'Numerosi sforzi sono stati fatti per raggiungere la locomozione agile nei robot quadrupedi attraverso controller classici o approcci basati sull'apprendimento per rinforzo,' scrissero Lei Han, Qingxu Zhu e i loro colleghi nel loro articolo. 'Questi metodi di solito si basano su modelli fisici o ricompense fatte a mano per descrivere accuratamente il sistema specifico, anziché su una comprensione generalizzata come fanno gli animali. Proponiamo uno schema gerarchico per costruire la conoscenza a livello primitivo, ambientale e strategico che è pre-addestrabile, riutilizzabile e arricchibile per i robot a zampe.'
Il nuovo schema proposto dai ricercatori si sviluppa su tre fasi di apprendimento per rinforzo, ognuna delle quali si concentra sull'estrazione della conoscenza a un diverso livello di compiti di locomozione e di percezione del robot. Il controller del team in ciascuna di queste fasi di apprendimento viene chiamato controller motore primitivo (PMC), controller motore ambientale-primitivo (EPMC) e controller motore strategico-ambientale-primitivo (SEPMC), rispettivamente.
'Il modulo primitivo riassume la conoscenza dai dati di movimento animale, dove, ispirati dai grandi modelli pre-addestrati nell'ambito della comprensione del linguaggio e delle immagini, introduciamo modelli generativi profondi per produrre segnali di controllo del motore che stimolano i robot a zampe ad agire come veri animali,' scrissero i ricercatori. 'Modelliamo poi varie capacità di attraversamento a un livello più alto per allinearsi con l'ambiente riutilizzando il modulo primitivo. Infine, un modulo strategico viene addestrato, focalizzandosi su compiti più complessi riutilizzando la conoscenza dai livelli precedenti.'
I ricercatori hanno valutato il loro schema proposto in una serie di esperimenti, in cui lo hanno applicato a un robot quadrupede chiamato MAX. In particolare, due robot MAX sono stati fatti competere in un gioco simile a un nascondino e lo schema è stato utilizzato per controllare i loro movimenti.
'Applichiamo i controller gerarchici addestrati al robot MAX, un robot quadrupede sviluppato internamente, per imitare gli animali, attraversare ostacoli complessi e giocare in un progettato e impegnativo gioco multigiocatore a chase tag, in cui emerge l'agilità e la strategia simili alla vita reale nei robot,' scrisse il team.
Nei loro test iniziali, i ricercatori hanno scoperto che il loro modello ha permesso al robot MAX di attraversare con successo ambienti diversi, eseguendo movimenti agili che assomigliano a quelli degli animali. In futuro, il modello potrebbe essere adattato e applicato ad altri robot a quattro zampe, facilitandone potenzialmente la distribuzione in ambienti reali.
Maggiori informazioni: Lei Han et al, Lifelike agility and play in quadrupedal robots using reinforcement learning and generative pre-trained models, Nature Machine Intelligence (2024). DOI: 10.1038/s42256-024-00861-3
© 2024 Science X Network