Un approccio per pianificare le azioni dei team di robot in condizioni di incertezza
18 novembre 2023
Caratteristica
Questo articolo è stato revisionato secondo il processo editoriale e le politiche di Science X. Gli editor hanno evidenziato i seguenti attributi garantendo la credibilità dei contenuti:
- verifica dei fatti
- pre-stampa
- fonte affidabile
- corretta bozza
di Ingrid Fadelli, Tech Xplore
Mentre la maggior parte dei robot viene inizialmente testata in laboratori e altri ambienti controllati, sono progettati per essere impiegati in ambienti reali, aiutando gli esseri umani a affrontare vari problemi. Navigare in ambienti reali comporta la gestione di elevati livelli di incertezza e imprevedibilità, soprattutto quando i robot completano missioni come squadra.
Negli ultimi anni, gli informatici hanno cercato di sviluppare strutture e modelli che potrebbero migliorare la capacità dei robot di risolvere efficacemente problemi al di fuori degli ambienti di laboratorio, dove è più probabile che incontrino sfide impreviste. Questi strumenti computazionali potrebbero facilitare ulteriormente l'adozione diffusa dei robot, migliorandone la capacità di completare con successo le missioni.
Recentemente, un team di ricerca presso la Johns Hopkins University ha introdotto un nuovo framework progettato per pianificare le azioni dei robot in squadra, tenendo conto anche dell'incertezza con cui operano. Il loro approccio proposto, presentato in un documento pre-pubblicato su arXiv, si basa su un metodo computazionale introdotto per la prima volta in uno dei loro lavori precedenti.
"La pianificazione in presenza di incertezza è una sfida fondamentale nella robotica", hanno scritto Cora A. Dimmig, Kevin C. Wolfe e i loro colleghi nel loro articolo. "Per le squadre di robot multipli, la sfida è ulteriormente esacerbata, poiché il problema di pianificazione può diventare rapidamente intrattabile dal punto di vista computazionale all'aumentare del numero di robot. Proponiamo un nuovo approccio per la pianificazione in presenza di incertezza utilizzando squadre eterogenee di robot multipli".
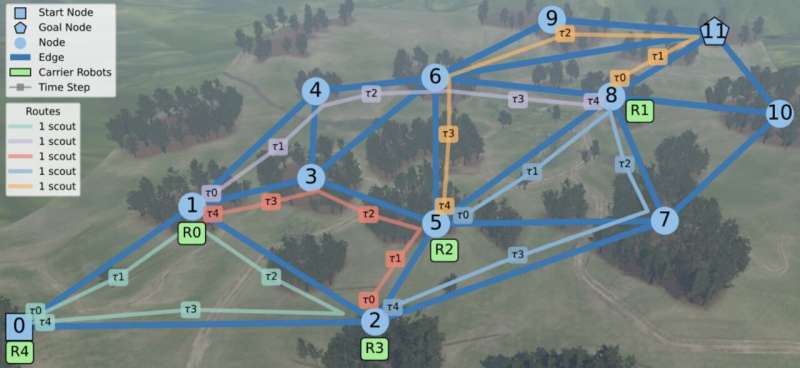
L'approccio proposto da Dimmig, Wolfe e i loro collaboratori si applica a scenari in cui i diversi robot all'interno di una squadra possono svolgere ruoli differenti, poiché tutti i robot lavorano collettivamente per completare una missione comune all'aperto. Fondamentalmente, il team introduce l'idea che alcuni robot, che si muovono a velocità maggiori, potrebbero agire come scouts durante una missione del mondo reale, pattugliando regioni geografiche sconosciute o incerte per identificare sfide potenziali e pianificare meglio le azioni di tutti gli altri robot.
"Ciò consente di indagare sia la pianificazione per ridurre al minimo il rischio associato all'incertezza nei percorsi proposti, sia la pianificazione per ridurre al minimo l'incertezza complessiva nell'ambiente", spiegano i ricercatori nel loro articolo.
Il metodo per pianificare le azioni delle squadre di robot proposto da Dimmig, Wolfe e i loro colleghi si basa su due principali approcci di programmazione, ovvero la creazione di un grafo topologico dinamico e la cosiddetta programmazione intera mista. L'approccio del team prevede l'impiego di due diversi tipi di robot. Il primo tipo ha il compito di completare le missioni, mentre il secondo effettua una ricognizione dell'ambiente per raccogliere dati e ridurre l'incertezza, facilitando il completamento di una determinata attività.
Fino ad ora, i ricercatori hanno valutato il loro approccio dal punto di vista computazionale in diversi scenari possibili che potrebbero introdurre incertezza durante le missioni nel mondo reale. I risultati ottenuti sono stati promettenti, suggerendo che il loro metodo proposto potrebbe aiutare a migliorare le prestazioni delle squadre di robot in compiti che presentano diversi gradi di incertezza.
"Testiamo il nostro approccio in diversi scenari rappresentativi in cui la squadra di robot deve muoversi attraverso un ambiente riducendo al minimo la rilevazione in presenza di posizioni chi relativa incerte", scrivono i ricercatori. "Dimostriamo che il nostro approccio è sufficientemente maneggevole dal punto di vista computazionale per la ripianificazione in tempo reale in ambienti cambianti, può migliorare le prestazioni in presenza di informazioni imperfette e può essere adattato per soddisfare profili di rischio differenti".
In futuro, il nuovo approccio sviluppato da Dimmig, Wolfe e i loro collaboratori potrebbe essere ulteriormente testato utilizzando sia robot simulati sia fisici per validarne il potenziale. Inoltre, questo recente lavoro potrebbe ispirare altri team di ricerca a sviluppare metodi simili per migliorare le prestazioni dei robot in complessi ambienti del mondo reale, facilitandone infine il dispiegamento su larga scala.
© 2023 Science X Network



