Planning Robot Team Actions in Unpredictable Environments: A Novel Approach
The date is November 18, 2023.
A featured article today has undergone the rigorous editorial process and policies of Science X. The content has been meticulously fact-checked, proofread, and is supported by trusted sources. Editors guarantee the credibility of the content and highlight its primary features such as its preprint status.
The article is written by Tech Xplore's Ingrid Fadelli. It discusses how robots, commonly tested in laboratory settings and controlled environments, are designed for real-world applications. Their aim is to aid humans in solving multiple issues. However, this requires them to navigate unpredictable environments, especially when operating as a team.
Recently, in the field of computer science, there are endeavors to create models and frameworks that boost robots' ability to tackle problems in real-world scenarios effectively. These approaches could eventually make robots commonplace, enhancing their effectiveness and proficiency in fulfilling their missions.
An innovative framework has been unveiled by researchers at Johns Hopkins University. It is intended to plan robot team's actions while addressing the uncertainty present in their operation. The team builds on a computational approach from their earlier work.
In their paper, researchers Cora A. Dimmig, Kevin C. Wolfe and their team describe the process. They note that planning amidst uncertainty is a crucial challenge within robotics. It becomes an even bigger issue for multi-robot teams as the planning becomes computationally exhaustive with an increasing number of robots. The group proposes an original approach that utilizes multi-robot teams for planning under uncertain conditions.
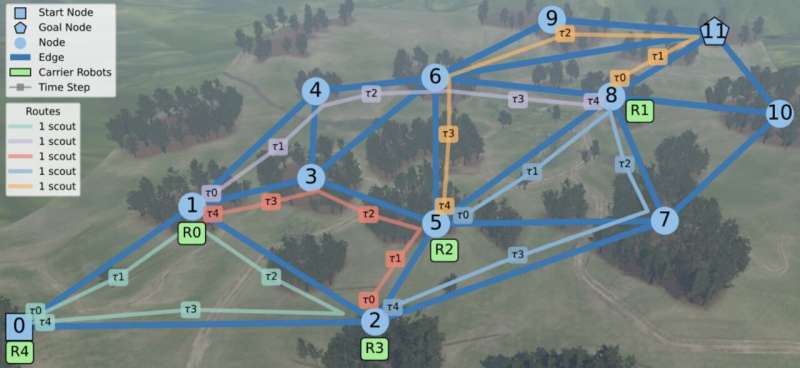
The team suggests that robots moving at quicker speeds could act as scouts, allowing uncertainty in geographical areas to be explored ahead of time and potential challenges to be identified. Thus, preparing for the actions of the remaining robots in the team.
The researchers proceed to explain their method. It leans on the creation of a dynamic topological graph and mixed-integer programming for planning the actions of robot teams. Their computation involves two types of robots - one for completing missions and the other for collecting data to decrease uncertainty.
The approach appears to be effective based on computational evaluation in multiple scenarios that introduce uncertainty during real-world missions. The researchers believe their method could greatly improve the performances of robot teams when faced with varying degrees of uncertainty.
The research team details their approach and findings methodically. They expressed that their method is suitable for real-time re-planning in changing conditions. It also allows for better performance in imperfect information and can be adjusted to different risk profiles.
In the foreseeable future, further tests could validate this approach using both physical and simulated robots. Additionally, this breakthrough may inspire other research teams to devise similar methods to escalate the performance of robots in complex real-world environments. Thus, encouraging large-scale deployment.
© 2023 Science X Network



