Ein Ansatz, um die Aktionen von Roboter-Teams unter unsicheren Bedingungen zu planen.
18. November 2023 Merkmal
Dieser Artikel wurde gemäß dem Redaktionsprozess und den Richtlinien von Science X überprüft. Die Herausgeber haben bei der Gewährleistung der Glaubwürdigkeit des Inhalts die folgenden Merkmale hervorgehoben:
- Tatsachenprüfung
- Vorabdruck
- Vertrauenswürdige Quelle
- Korrekturgelesen
von Ingrid Fadelli , Tech Xplore
Während die meisten Roboter anfangs in Laborumgebungen und anderen kontrollierten Umgebungen getestet werden, sind sie darauf ausgelegt, in realen Umgebungen eingesetzt zu werden, um Menschen bei der Bewältigung verschiedener Probleme zu unterstützen. Die Navigation in realen Umgebungen erfordert den Umgang mit hohen Unsicherheits- und Unvorhersehbarkeitsniveaus, insbesondere wenn Roboter als Team Missionen absolvieren.
In den letzten Jahren haben Informatiker versucht, Frameworks und Modelle zu entwickeln, die die Fähigkeit von Robotern verbessern können, Probleme außerhalb von Laborumgebungen effektiv zu lösen, wo sie eher auf unvorhergesehene Herausforderungen stoßen. Diese rechnerischen Werkzeuge könnten letztendlich die weitreichende Verbreitung von Robotern erleichtern und ihre Fähigkeit zur erfolgreichen Durchführung von Missionen verbessern.
Ein Forschungsteam der Johns-Hopkins-Universität hat kürzlich ein neues Framework vorgestellt, das die Planung der Aktionen von Robotern in einem Team unter Berücksichtigung der darunter liegenden Unsicherheit ermöglichen soll. Ihr vorgeschlagener Ansatz, der in einem auf arXiv vorab veröffentlichten Artikel beschrieben wird, baut auf einer rechnerischen Methode auf, die in einer ihrer früheren Arbeiten eingeführt wurde.
'Die Planung unter Unsicherheit ist eine grundlegende Herausforderung in der Robotik', schrieben Cora A. Dimmig, Kevin C. Wolfe und ihre Kollegen in ihrem Artikel. 'Für Mehrroboterteams wird die Herausforderung weiter verschärft, da sich das Planungsproblem bei zunehmender Anzahl von Robotern schnell zu einem rechnerisch unüberwindbaren Problem entwickeln kann. Wir schlagen einen neuartigen Ansatz zur Planung unter Unsicherheit mit Hilfe heterogener Mehrroboterteams vor.'
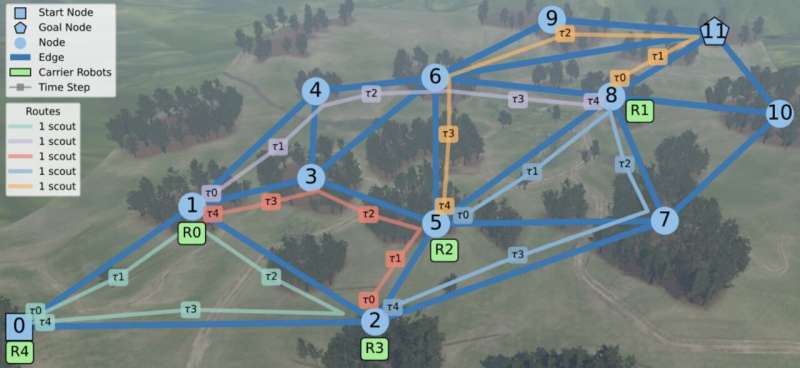
Der von Dimmig, Wolfe und ihren Mitarbeitern vorgeschlagene Ansatz gilt für Szenarien, in denen verschiedene Roboter in einem Team unterschiedliche Rollen übernehmen und alle Roboter gemeinsam daran arbeiten, eine gemeinsame Mission im Freien abzuschließen. Im Wesentlichen führen die Forscher die Idee ein, dass einige Roboter, die sich schneller bewegen, während einer bestimmten Mission in der realen Welt als Kundschafter fungieren könnten, um unbekannte oder unsichere geografische Regionen zu patrouillieren und potenzielle Herausforderungen zu identifizieren und die Aktionen aller anderen Roboter besser zu planen.
'Dies ermöglicht die Untersuchung sowohl der Planung zur Minimierung des mit Unsicherheit in vorgeschlagenen Pfaden verbundenen Risikos als auch der Planung zur Minimierung der Gesamtunsicherheit in der Umgebung', erklärten die Forscher in ihrem Artikel.
Die von Dimmig, Wolfe und ihren Kollegen vorgestellte Methode zur Planung der Aktionen von Roboterteams basiert auf zwei Hauptprogrammieransätzen, nämlich der Erstellung eines dynamischen topologischen Graphen und der sogenannten gemischt-ganzzahligen Programmierung. Der Ansatz des Teams beinhaltet den Einsatz von zwei verschiedenen Arten von Robotern. Der erste Typ ist damit beauftragt, Missionen abzuschließen, während der zweite die Umgebung aufklärt, um Daten zu sammeln und Unsicherheit zu reduzieren, was die Absolvierung einer Aufgabe erleichtert.
Bisher haben die Forscher ihre Methode rechnerisch in verschiedenen möglichen Szenarien evaluiert, die Unsicherheit während realer Missionen einführen könnten. Ihre Ergebnisse waren vielversprechend und legen nahe, dass ihre vorgeschlagene Methode dazu beitragen könnte, die Leistung von Roboter-Teams bei Aufgaben mit unterschiedlichen Unsicherheitsgraden zu verbessern.
'Wir testen unseren Ansatz in einer Reihe von repräsentativen Szenarien, in denen das Roboter-Team sich durch eine Umgebung bewegen muss und dabei die Erkennung bei unsicheren Beobachterpositionen minimiert', schrieben die Forscher. 'Wir zeigen, dass unser Ansatz für Echtzeit-Neuplanung in sich ändernden Umgebungen ausreichend rechnerisch lösbar ist, die Leistung bei unvollständigen Informationen verbessern kann und zur Anpassung an verschiedene Risikoprofile verwendet werden kann.'
In der Zukunft könnte der neue von Dimmig, Wolfe und ihren Mitarbeitern entwickelte Ansatz weiterhin mittels simulierter und physischer Roboter getestet werden, um sein Potential zu validieren. Darüber hinaus könnte diese jüngste Arbeit andere Forschungsteams dazu inspirieren, ähnliche Methoden zur Verbesserung der Leistung von Robotern in komplexen realen Umgebungen zu entwickeln und letztendlich ihre breitflächige Bereitstellung zu erleichtern.
© 2023 Science X Network



