Une approche pour planifier les actions des équipes de robots dans des conditions incertaines.
18 novembre 2023
Cet article a été examiné selon le processus éditorial et les politiques de Science X.
Les éditeurs ont mis en évidence les attributs suivants tout en garantissant la crédibilité du contenu:
- vérification des faits
- prépublication
- source fiable
- relecture
par Ingrid Fadelli, Tech Xplore
Alors que la plupart des robots sont initialement testés en laboratoire et dans d'autres environnements contrôlés, ils sont conçus pour être déployés dans des environnements réels, aidant les humains à résoudre divers problèmes. Naviguer dans des environnements réels implique de faire face à des niveaux élevés d'incertitude et d'imprévisibilité, en particulier lorsque les robots accomplissent des missions en équipe.
Ces dernières années, les informaticiens ont tenté de développer des cadres et des modèles pouvant améliorer la capacité des robots à résoudre efficacement des problèmes en dehors des laboratoires, où ils sont davantage susceptibles de rencontrer des défis imprévus. Ces outils informatiques pourraient ultimement faciliter l'adoption généralisée des robots, améliorant leur capacité à mener à bien leurs missions avec succès.
Une équipe de recherche de l'Université Johns Hopkins a récemment présenté un nouveau cadre conçu pour planifier les actions des robots en équipe tout en tenant compte de l'incertitude dans laquelle ils opèrent. Leur approche proposée, introduite dans un article pré-publié sur arXiv, s'appuie sur une méthode informatique initialement présentée dans l'une de leurs précédentes études.
"La planification sous incertitude est un défi fondamental en robotique", ont écrit Cora A. Dimmig, Kevin C. Wolfe et leurs collègues dans leur article. "Pour les équipes de robots multi-robots, le défi est encore plus important, car le problème de planification peut rapidement devenir intractable du point de vue computationnel à mesure que le nombre de robots augmente. Nous proposons une nouvelle approche pour la planification sous incertitude en utilisant des équipes de robots multi-robots hétérogènes."
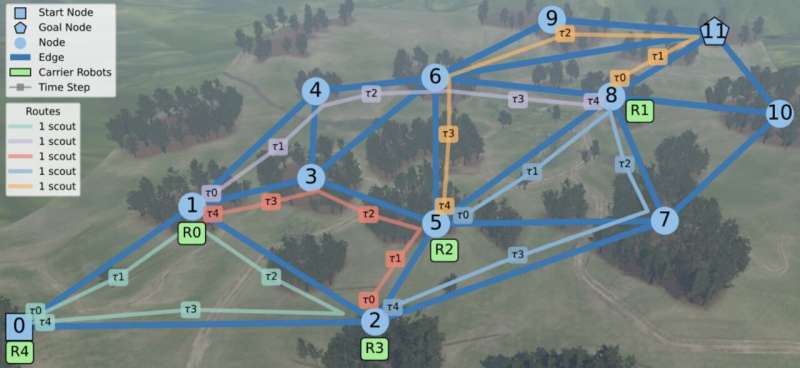
L'approche proposée par Dimmig, Wolfe et leurs collaborateurs s'applique aux scénarios dans lesquels différents robots d'une équipe peuvent endosser différents rôles, tandis que tous les robots travaillent collectivement pour accomplir une mission commune en extérieur. Essentiellement, l'équipe introduit la notion que certains robots, qui se déplacent à des vitesses plus élevées, pourraient agir en tant qu'éclaireurs lors d'une mission réelle donnée, patrouillant les régions géographiques inconnues ou incertaines pour identifier les défis potentiels et mieux planifier les actions de tous les autres robots.
"Cela permet d'envisager à la fois une planification visant à minimiser le risque associé à l'incertitude dans les chemins proposés, ainsi qu'une planification visant à minimiser l'incertitude globale dans l'environnement", ont expliqué les chercheurs dans leur article.
La méthode de planification des actions des équipes de robots introduite par Dimmig, Wolfe et leurs collègues repose sur deux approches de programmation principales, à savoir la création d'un graphe topologique dynamique et la programmation en nombres entiers mixtes. L'approche de l'équipe implique le déploiement de deux types différents de robots. Le premier type est chargé d'accomplir des missions, tandis que le second explore les environnements pour collecter des données et réduire l'incertitude, facilitant ainsi l'accomplissement des tâches.
Jusqu'à présent, les chercheurs ont évalué leur approche de manière computationnelle sur divers scénarios possibles qui pourraient introduire de l'incertitude lors de missions réelles. Leurs résultats étaient prometteurs, suggérant que leur méthode proposée pourrait contribuer à améliorer les performances des équipes de robots sur des tâches comportant différents degrés d'incertitude.
"Nous testons notre approche dans un certain nombre de scénarios représentatifs où l'équipe de robots doit se déplacer dans un environnement tout en minimisant la détection en présence de positions d'observateurs incertaines", ont écrit les chercheurs. "Nous démontrons que notre approche est suffisamment calculatoirement abordable pour un re-planification en temps réel dans des environnements changeants, peut améliorer les performances en présence d'informations imparfaites et peut être adaptée pour prendre en compte différents profils de risque."
A l'avenir, la nouvelle approche développée par Dimmig, Wolfe et leurs collaborateurs pourrait être testée plus en profondeur à l'aide de robots simulés et physiques afin de valider son potentiel. De plus, ce travail récent pourrait inspirer d'autres équipes de recherche à développer des méthodes similaires pour améliorer les performances des robots dans des environnements réels complexes, facilitant ainsi leur déploiement à grande échelle.
© 2023 Science X Network



