Un enfoque para planificar las acciones de equipos de robots en condiciones inciertas
18 de noviembre de 2023
característica
Este artículo ha sido revisado de acuerdo con el proceso editorial y las políticas de Science X. Los editores han destacado los siguientes atributos al garantizar la credibilidad del contenido:
- verificado por hechos
- preprint
- fuente confiable
- cotejado
por Ingrid Fadelli, Tech Xplore
Aunque la mayoría de los robots se prueban inicialmente en entornos de laboratorio y otros entornos controlados, están diseñados para ser desplegados en entornos del mundo real, ayudando a los humanos a resolver diversos problemas. Navegar por entornos del mundo real implica lidiar con altos niveles de incertidumbre e imprevisibilidad, especialmente cuando los robots completan misiones en equipo.
En los últimos años, los científicos de la computación han estado tratando de desarrollar marcos y modelos que puedan mejorar la capacidad de los robots para resolver eficazmente problemas fuera de entornos de laboratorio, donde es más probable que encuentren desafíos imprevistos. Estas herramientas computacionales podrían facilitar en última instancia la adopción generalizada de robots, mejorando su capacidad para completar misiones con éxito.
Un equipo de investigación de la Universidad de Johns Hopkins presentó recientemente un nuevo marco diseñado para planificar las acciones de los robots en equipo, teniendo en cuenta la incertidumbre en la que operan. Su enfoque propuesto, presentado en un artículo prepublicado en arXiv, se basa en un método computacional presentado anteriormente en uno de sus trabajos anteriores.
"La planificación bajo incertidumbre es un desafío fundamental en la robótica", escribieron Cora A. Dimmig, Kevin C. Wolfe y sus colegas en su artículo. "Para equipos de múltiples robots, el desafío se exacerba aún más, ya que el problema de planificación puede volverse computacionalmente intratable a medida que aumenta el número de robots. Proponemos un enfoque novedoso para la planificación bajo incertidumbre utilizando equipos heterogéneos de múltiples robots."
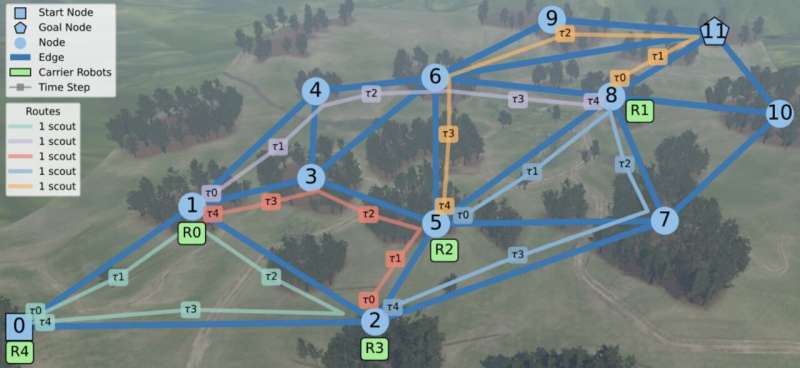
El enfoque propuesto por Dimmig, Wolfe y sus colaboradores se aplica a escenarios en los que diferentes robots en un equipo pueden asumir diferentes roles, mientras todos los robots trabajan en conjunto para completar una misión común al aire libre. Básicamente, el equipo introduce la idea de que algunos robots, que se mueven a velocidades más altas, podrían actuar como exploradores durante una misión del mundo real dada, patrullando regiones geográficas desconocidas o inciertas para identificar desafíos potenciales y planificar mejor las acciones de todos los demás robots.
"Esto permite investigar tanto la planificación para minimizar el riesgo asociado con la incertidumbre en las rutas propuestas, como la planificación para minimizar la incertidumbre general en el entorno", explicaron los investigadores en su artículo.
El método para planificar las acciones de equipos de robots presentado por Dimmig, Wolfe y sus colegas se basa en dos enfoques principales de programación, a saber, la creación de un grafo topológico dinámico y la llamada programación mixta de enteros. El enfoque del equipo implica el despliegue de dos tipos diferentes de robots. El primer tipo tiene la tarea de completar misiones, mientras que el segundo explora los entornos para recopilar datos y reducir la incertidumbre, facilitando la finalización de una tarea.
Hasta ahora, los investigadores han evaluado su enfoque computacionalmente en varios escenarios posibles que podrían introducir incertidumbre durante las misiones del mundo real. Sus hallazgos fueron prometedores, lo que sugiere que su método propuesto podría ayudar a mejorar el rendimiento de los equipos de robots en tareas que contienen diferentes grados de incertidumbre.
"Probamos nuestro enfoque en una serie de escenarios representativos donde el equipo de robots debe moverse a través de un entorno mientras minimiza la detección en presencia de posiciones de observadores inciertas", escribieron los investigadores. "Demostramos que nuestro enfoque es lo suficientemente computacionalmente tratable para la replanificación en tiempo real en entornos cambiantes, puede mejorar el rendimiento en presencia de información imperfecta y puede ajustarse para adaptarse a diferentes perfiles de riesgo."
En el futuro, el nuevo enfoque desarrollado por Dimmig, Wolfe y sus colaboradores podría ser probado aún más utilizando tanto robots simulados como físicos para validar su potencial. Además, este trabajo reciente podría inspirar a otros equipos de investigación a desarrollar métodos similares para mejorar el rendimiento de los robots en entornos complejos del mundo real, facilitando en última instancia su implementación a gran escala.
© 2023 Science X Network



