Ein oszillierender Roboter kann sich durch die Reflexion von Wasserwellen vorantreiben.
9. März 2024 Merkmal
Dieser Artikel wurde gemäß dem konformen Redaktionsprozess und den Richtlinien von Science X überprüft. Die Redakteure haben die folgenden Merkmale hervorgehoben, während sie die Glaubwürdigkeit des Inhalts sicherstellten:
- Faktenüberprüft
- Von Fachkollegen geprüfte Veröffentlichung
- Vertrauenswürdige Quelle
- Korrekturgelesen
von David Appell , Tech Xplore
Merkwürdige Dinge können geschehen, wenn eine Welle auf eine Grenze trifft. Im Ozean können Tsunami-Wellen, die im offenen Meer kaum bemerkbar sind, an der Kontinentalkante und am Ufer sehr groß werden, da sich die Wellen verlangsamen und ihre Masse nach oben bewegt.
Der Casimir-Effekt ist die Anziehung zweier ungeladener, paralleler Platten, weil virtuelle quantenmechanische Wellen mit einer Wellenlänge größer als der Plattenabstand zwischen ihnen ausgeschlossen sind. Virtuelle Felder außerhalb der Platten drücken sie also nach innen. Parallele Platten, die teilweise im Wasser eingetaucht sind, ziehen sich gegenseitig an, da längere Wellenlängenwellen mit Impuls, die das Wasser tragen, aus der zentralen Region ausgeschlossen sind. (Spekulationen über einen maritimen Casimir-Effekt zwischen festgemachten Schiffen sind noch in der Diskussion.)
Jetzt haben Wissenschaftler gezeigt, dass ein schwebender, symmetrisch oszillierender Roboter Kräfte erfahren wird, wenn er sich einer Grenze nähert. Diese Kräfte können für den Selbstantrieb genutzt werden, ohne dass dafür typischere Mechanismen wie ein Propeller erforderlich sind.
Die Studie wurde in der Zeitschrift Physical Review Letters veröffentlicht.
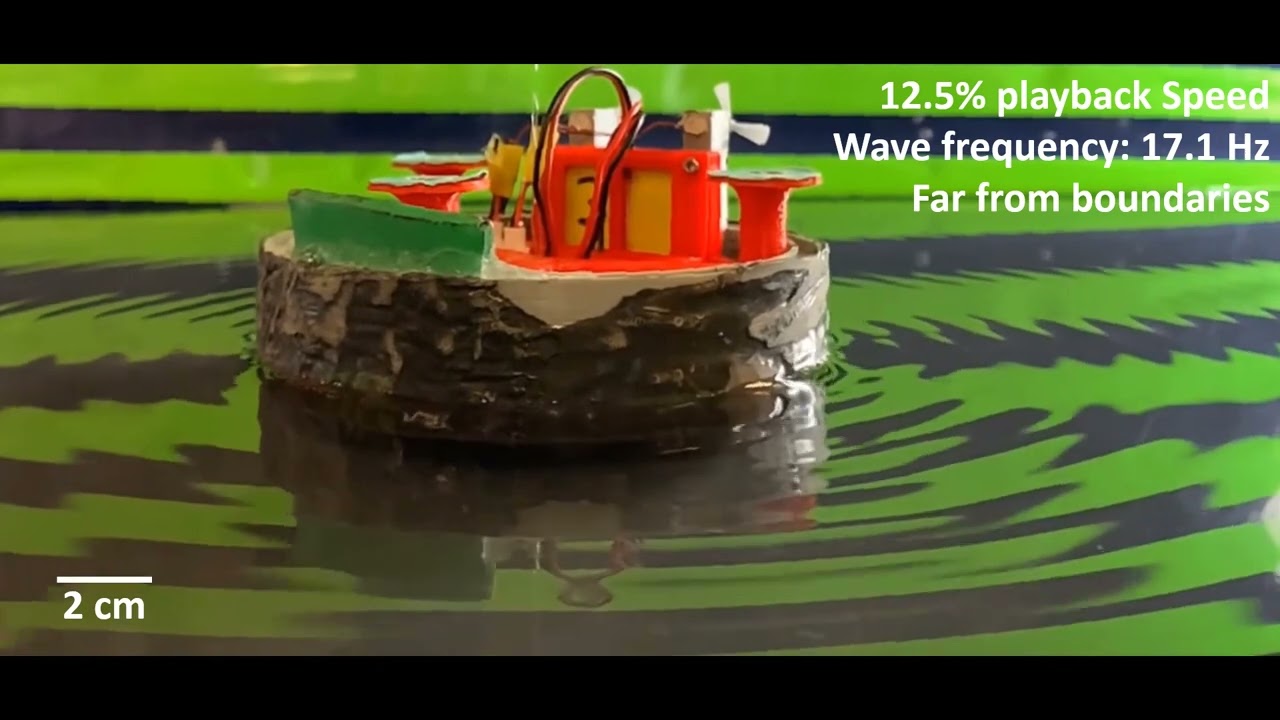
Unter der Leitung des Doktoranden Steven W. Tarr am Georgia Institute of Technology baute das Team einen 3D-gedruckten kreisförmigen Schwimmer mit einem Durchmesser von 12 cm und einer Masse von 368 g. An Bord wurden batteriebetriebene Motoren befestigt, die das Boot mit einer kontrollierbaren Frequenz vibrieren ließen, was eine Schwingungsbewegung entlang der Vor-Achse erzeugte. Wenn das Gerät eingeschaltet war, erzeugte es eine Reihe von symmetrischen Wellen auf der Wasseroberfläche, alle mit der gleichen Wellenlänge, die von ihm wegstrahlten.
Eine Acrylplatte wurde in der Nähe im Wasser platziert, um als Grenze zu wirken, ausreichend lang, um effektiv ein eindimensionales System zu schaffen, sodass nur die Bewegung des Boots senkrecht zur Wand überwacht werden musste. Weit entfernt von der Wand (relativ zur Größe des Boots und der Wellenlängen der Wasserwellen) gab es keine Nettokraft auf das Boot. Aber in der Nähe der Wand wurde beobachtet, dass das wellenerzeugende Boot entweder ein attraktives oder abstoßendes Verhalten zeigte, je nachdem, wie sich der Ursprungsabstand von der Wand und die Frequenz der erzeugten Wasserwellen verhielten.
Die Forscher verwendeten eine Webcam, um die Bewegung des Boots aufzuzeichnen und seine seitliche Bewegung (senkrecht zur Wand) zu messen, während sie auch seine Beschleunigung in dieser senkrechten Richtung maßen (die weniger als 100 Mikrometer pro Sekunde im Quadrat betrug). Wellen, die von dem oszillierenden Boot ausgingen, wurden mit einer Hochgeschwindigkeitskamera per Schlierenfotografie betrachtet und gemessen, die Änderungen im Fluss eines Fluids misst, indem sie Änderungen des Brechungsindex beobachtet.
Wenn es nah an der Wand begann - etwa ein halber Radius oder weniger - wurde das Boot immer mehr zur Wand hingezogen, wenn sich der Anfangsabstand verringerte und die Frequenz der Schwingungen zunahm (und daher auch die Frequenz der Wasserwellen). In einem mittleren Bereich, bei einem anfänglichen Abstand von ungefähr zwei Dritteln des Radius und bei niedrigeren Frequenzen, wurde die Kraft auf das Boot leicht abstoßend und bewegte es von der Wand weg. Bei großen Entfernungen (relativ zum Radius) gab es keine Nettokraft auf das Boot.
Weil die Beschleunigung recht gering war, weniger als 10-millionstel der Erdanziehungskraft ('g'), wurden Maßnahmen ergriffen, um die Kräfte von kurzfristigen Auswirkungen der Viskosität, des Widerstands des Bootes aufgrund der Wellen selbst und der Trägheit des Bootes zu isolieren. Dennoch waren die Kräfte gering, unter 100 Mikronewton.
Das Phänomen der Netto-Kraft-Selbstpropagation der Wellen, die von dem Boot ausgingen, trat auf, wenn reflektierte Wellen von der Wand mit ausreichender Energie auf den Rumpf des Boots trafen. An der Seite der Wand des Bootes trafen die reflektierten Wellen den Rumpf mit einer geringeren Wellenhöhe (Amplitude), als sie ihn verließen, aufgrund der Dispersion der Wellen, als sie über die Oberfläche des Wassers reisten. Diese kleineren zurückkehrenden Wellen wurden von den größeren ausgehenden Wellen subtrahiert, interferierten und verringerten effektiv die Amplitude der Wellen, die das Boot auf der Wandseite aussendete.
Effektiv emittierte das Boot asymmetrische Wellen, größer in die entgegengesetzte Richtung zur Wand und kleiner zur Wand hin. Diese Asymmetrie zwischen den beiden Seiten des Boots führte zu einer anziehenden Kraft zur Wand hin.
Further from the wall, the reflected waves had too small a height to affect net wave generation, but still carried some momentum, resulting in a slight repulsive force. Far from the wall, the reflected waves had dissipated so they provided no meaningful force.
Frequency dependence arose because while the energy of the reflected wave increased with frequency, the contact of the emitted waves with the wall led to complicated dynamics at the contact line, dissipating substantial energy and modifying the amplitude of the reflected waves.
'Our study is a terrific example of the wealth of phenomena waiting to be discovered at the interface of physics and robotics,' said Daniel Goldman, a co-author and physics professor at the Georgia Institute of Technology, who calls this field 'robophysics.'
'Making and using analogies from other branches of physics (in this case, the Casimir effect in quantum field theory) can be useful in developing new approaches to robot movement analogous to our previous work on 'mechanical diffraction' in undulatory limbless systems,' Goldman concluded.
© 2024 Science X Network



