Un robot oscilante puede propulsarse a través de la reflexión de las ondas de agua.
9 de marzo de 2024
Característica
Este artículo ha sido analizado de acuerdo con el proceso editorial y las políticas de Science X. Ha sido verificado, revisado por pares y obtenido de autoridades confiables para garantizar un contenido confiable. Ha sido revisado por David Appell de Tech Xplore.
Cuando una onda encuentra un límite, pueden ocurrir cosas inusuales. Por ejemplo, las olas de un tsunami aparentemente insignificantes en las profundidades del mar se transforman en olas enormes al llegar a tierra. Esto sucede cuando las olas se desaceleran y su masa se eleva en la plataforma continental y la costa.
El efecto Casimir denota la atracción entre dos placas paralelas descargadas. Las placas se atraen entre sí debido a la ausencia de ondas virtuales de la mecánica cuántica, que tienen longitudes de onda mayores que la separación de las placas. De manera similar, las placas paralelas sumergidas en agua se atraen parcialmente entre sí. Sin embargo, el especulado efecto marítimo Casimir entre los barcos atracados sigue sin confirmarse.
Recientemente, los investigadores han demostrado que un robot oscilante equilibrado sobre el agua experimenta fuerzas cuando está cerca de un límite. Estas fuerzas pueden aprovecharse para la autopropulsión sin medios convencionales como una hélice.
Estos hallazgos se han publicado en la prestigiosa revista Physical Review Letters.
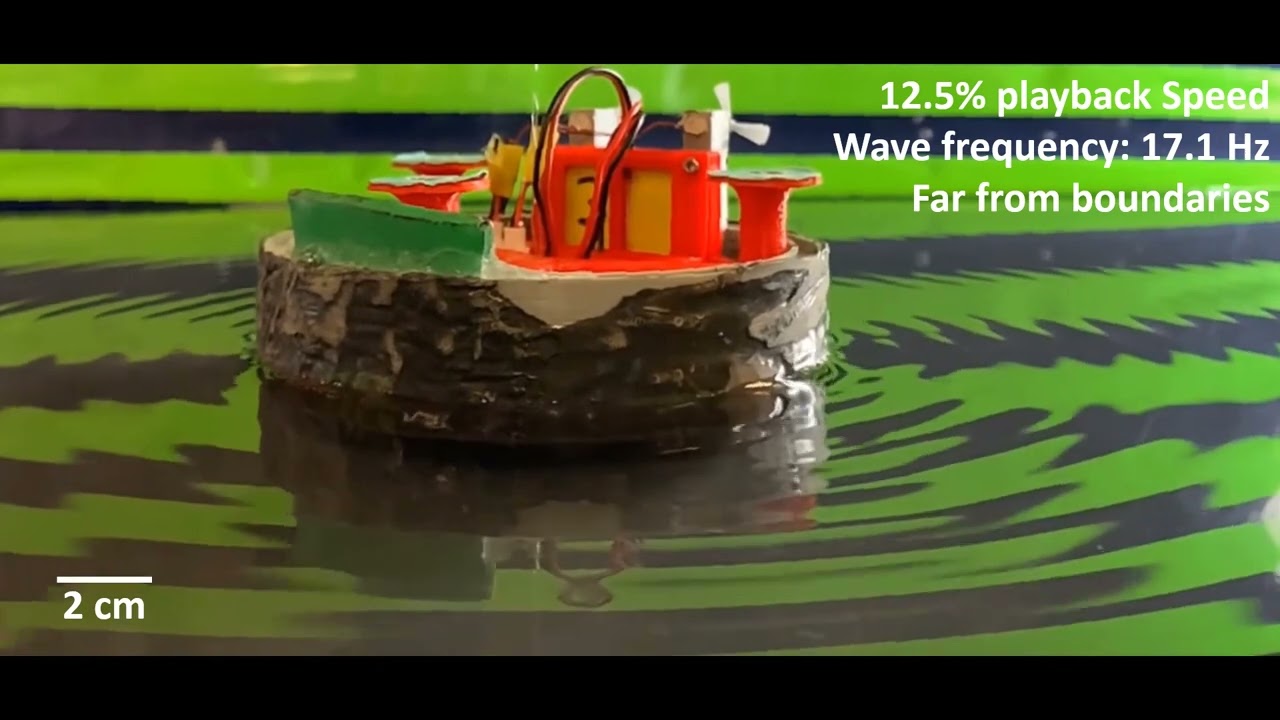
La investigación fue dirigida por Ph.D. estudiante Steven W. Tarr del Instituto de Tecnología de Georgia. El equipo creó un flotador impreso en 3D que vibra en el agua a una frecuencia controlada. El movimiento resultante genera ondas simétricas en longitudes de onda idénticas.
Según se informa, una lámina acrílica sirvió como límite. Se mantuvo lo suficientemente lejos del barco para crear un sistema unidimensional, lo que implicaba que se monitoreaba el movimiento del barco perpendicular a la pared. El equipo observó que el barco era atraído o repelido por la pared dependiendo de su distancia inicial y de la frecuencia de las ondas de agua generadas.
El movimiento del barco se registró mediante una cámara web, mientras que se utilizó una cámara de alta velocidad para ver y cuantificar las olas creadas por la oscilación del barco.
Cuando está cerca de la pared, el barco se siente más atraído hacia la pared a medida que se acerca y su frecuencia de oscilación aumenta. En distancias medias, el barco es repelido de la pared, mientras que en distancias mayores, el barco no se ve afectado.
A la luz de la minúscula aceleración, se tomaron medidas para evitar que se viera afectada por elementos como la viscosidad, la resistencia inducida por las olas en el barco y la inercia del barco. A pesar de ello, las fuerzas se mantuvieron por debajo de los 100 micronewtons.
El fenómeno locomotor de las olas del barco se produjo debido a la energía adecuada de las olas reflejadas que golpean el casco del barco. Como resultado, el barco logró olas asimétricas, más pequeñas hacia la pared. Esto creó una fuerza de atracción hacia la pared.
Más lejos de la pared, las ondas reflejadas tenían una altura demasiado pequeña para afectar la generación neta de ondas, pero aún tenían algo de impulso, lo que resultaba en una ligera fuerza repulsiva. Lejos de la pared, las ondas reflejadas se habían disipado por lo que no proporcionaban ninguna fuerza significativa.
La dependencia de la frecuencia surgió porque, si bien la energía de la onda reflejada aumentaba con la frecuencia, el contacto de las ondas emitidas con la pared conducía a una dinámica complicada en la línea de contacto, disipando una energía sustancial y modificando la amplitud de las ondas reflejadas.
"Nuestro estudio es un excelente ejemplo de la gran cantidad de fenómenos que esperan ser descubiertos en la interfaz de la física y la robótica", afirmó Daniel Goldman, coautor y profesor de física en el Instituto de Tecnología de Georgia, que llama a este campo "robofísica". '
"Hacer y utilizar analogías de otras ramas de la física (en este caso, el efecto Casimir en la teoría cuántica de campos) puede ser útil para desarrollar nuevos enfoques del movimiento de robots análogos a nuestro trabajo anterior sobre la 'difracción mecánica' en sistemas ondulatorios sin extremidades", Goldman concluyó.
© 2024 Red Ciencia X



