Un robot oscillant peut se propulser via la réflexion des ondes d'eau
9 mars 2024 fonctionnalité
Cet article a été examiné selon le processus éditorial de Science X et ses politiques. Les éditeurs ont mis en évidence les attributs suivants tout en garantissant la crédibilité du contenu:
- vérifié par des faits
- publication examinée par des pairs
- source fiable
- corrigé par des épreuves
par David Appell , Tech Xplore
Des choses étranges peuvent se produire lorsqu'une vague rencontre une frontière. Dans l'océan, des vagues de tsunami à peine perceptibles en eau profonde peuvent devenir assez grandes au niveau du plateau continental et du rivage, car les vagues ralentissent et que leur masse se déplace vers le haut.
L'effet Casimir est l'attraction de deux plaques parallèles non chargées en raison de vagues quantiques mécaniques virtuelles ayant des longueurs d'onde supérieures à la séparation des plaques qui sont exclues entre elles, de sorte que des champs virtuels à l'extérieur des plaques les poussent vers l'intérieur. Des plaques parallèles partiellement immergées dans l'eau s'attirent mutuellement car les ondes d'eau à longue longueur d'onde porteuses de mouvement sont exclues de la région centrale. (La spéculation sur un effet Casimir maritime entre des navires amarrés est encore en débat.)
Maintenant, des scientifiques ont montré qu'un robot flottant et symétrique oscillant subira des forces lorsqu'il approche d'une frontière. Ces forces peuvent être utilisées pour l'auto-propulsion sans avoir besoin de mécanismes plus typiques tels qu'une hélice.
L'étude est publiée dans le journal Physical Review Letters.
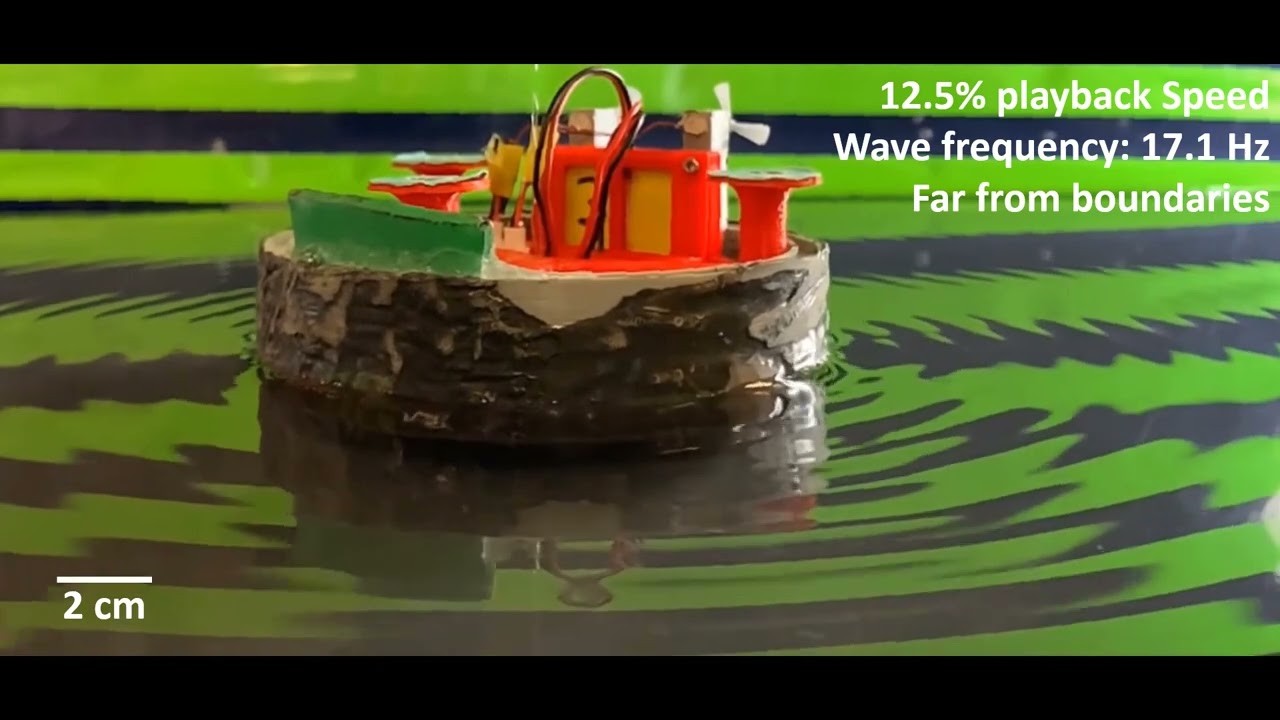
Dirigée par l'étudiant au doctorat Steven W. Tarr à l'Institut de technologie de Géorgie, l'équipe a construit un flotteur circulaire imprimé en 3D de 12 cm de diamètre avec une masse de 368 g. À bord, ils ont attachés des moteurs à pile vibrants qui font vibrer le bateau avec une fréquence contrôlable, produisant un mouvement vibrant le long de l'axe avant-arrière (roulis). Lorsqu'il était en marche, l'embarcation produisait une série de vagues symétriques à la surface de l'eau, toutes de la même longueur d'onde, se propageant loin de lui.
Une feuille acrylique a été placée à proximité dans l'eau pour agir comme frontière, suffisamment longue pour créer efficacement un système unidimensionnel, de sorte que seul le mouvement du bateau perpendiculaire au mur devait être surveillé. Loin du mur (par rapport à la taille du bateau et aux longueurs d'onde des vagues d'eau), il n'y avait pas de force nette sur le bateau. Mais près du mur, il a été observé que le bateau générateur d'ondes avait soit un comportement attractif soit répulsif, selon sa distance initiale par rapport au mur et la fréquence des ondes d'eau générées.
Les chercheurs ont utilisé une webcam pour enregistrer le mouvement du bateau et mesurer son déplacement latéral (perpendiculaire au mur), tout en mesurant également son accélération dans cette direction perpendiculaire (inférieure à 100 micromètres par seconde au carré). Les ondes émanant du bateau oscillant ont été visualisées et mesurées à l'aide d'une caméra haute vitesse via la photographie de Schlieren, qui mesure les changements du débit d'un fluide en observant les changements de son indice de réfraction.
Lorsqu'il était proche du mur - à environ la moitié de son rayon ou moins - le bateau était de plus en plus attiré vers le mur à mesure que sa distance initiale diminuait et sa fréquence d'oscillation augmentait (et donc la fréquence des ondes d'eau). Dans une plage moyenne, à une distance initiale d'environ les deux tiers d'un rayon et à des fréquences plus basses, la force exercée sur le bateau devenait légèrement répulsive, l'éloignant du mur. À de grandes distances (par rapport au rayon), il n'y avait pas de force nette sur le bateau.
Étant donné que l'accélération était assez faible, inférieure à 10 millionièmes de l'accélération gravitationnelle de la surface terrestre ('g'), des mesures ont été prises pour isoler les forces des effets à court terme de la viscosité, de la traînée sur le bateau due aux vagues elles-mêmes, et de l'inertie du bateau. Néanmoins, les forces étaient faibles, inférieures à 100 micronewtons.
Le phénomène de locomotion d'auto-propagation de la force nette des ondes émanant du bateau s'est produit lorsque les ondes réfléchies par le mur ont frappé la coque du bateau avec suffisamment d'énergie. Du côté du mur du bateau, les ondes réfléchies ont frappé la coque avec une hauteur d'onde plus petite (amplitude) qu'elles ne l'ont quittée, en raison de la dispersion des ondes lorsqu'elles ont voyagé à travers la surface de l'eau. Ces ondes de retour plus petites ont été soustraites des ondes émises plus grandes, interférant et diminuant efficacement l'amplitude des ondes émises par le bateau du côté du mur.
En effet, le bateau émettait des ondes asymétriques, plus grandes dans la direction opposée au mur et plus petites vers le mur. Cette asymétrie entre les deux côtés du bateau a entraîné une force attractive vers le mur.
Further from the wall, the reflected waves had too small a height to affect net wave generation, but still carried some momentum, resulting in a slight repulsive force. Far from the wall, the reflected waves had dissipated so they provided no meaningful force.
Frequency dependence arose because while the energy of the reflected wave increased with frequency, the contact of the emitted waves with the wall led to complicated dynamics at the contact line, dissipating substantial energy and modifying the amplitude of the reflected waves.
'Our study is a terrific example of the wealth of phenomena waiting to be discovered at the interface of physics and robotics,' said Daniel Goldman, a co-author and physics professor at the Georgia Institute of Technology, who calls this field 'robophysics.'
'Making and using analogies from other branches of physics (in this case, the Casimir effect in quantum field theory) can be useful in developing new approaches to robot movement analogous to our previous work on 'mechanical diffraction' in undulatory limbless systems,' Goldman concluded.
© 2024 Science X Network



