Using Water Waves to Propel an Oscillating Robot
March 9, 2024
Feature
This article has been scrutinized according to the editorial process and policies of Science X. It has been fact-checked, peer-reviewed, and sourced from reliable authorities to ensure trustworthy content. It has been proofread by Tech Xplore's David Appell.
When a wave encounters a boundary, unusual things can occur. For example, seemingly insignificant tsunami waves in the deep sea transform into vast waves on reaching land. This happens as the waves decelerate and their mass elevates at the continental shelf and shore.
The Casimir effect denotes the attraction between two parallel uncharged plates. The plates attract each other due to the absence of virtual quantum mechanical waves, which have larger wavelengths than the plate separation. Similarly, parallel plates immersed in water partially attract each other. However, the speculated maritime Casimir effect between docked ships remains unconfirmed.
Recently, researchers have proven that a balanced oscillating robot on water experiences forces when close to a boundary. These forces can be harnessed for self-propulsion without conventional means such as a propeller.
These findings have been published in the esteemed Physical Review Letters journal.
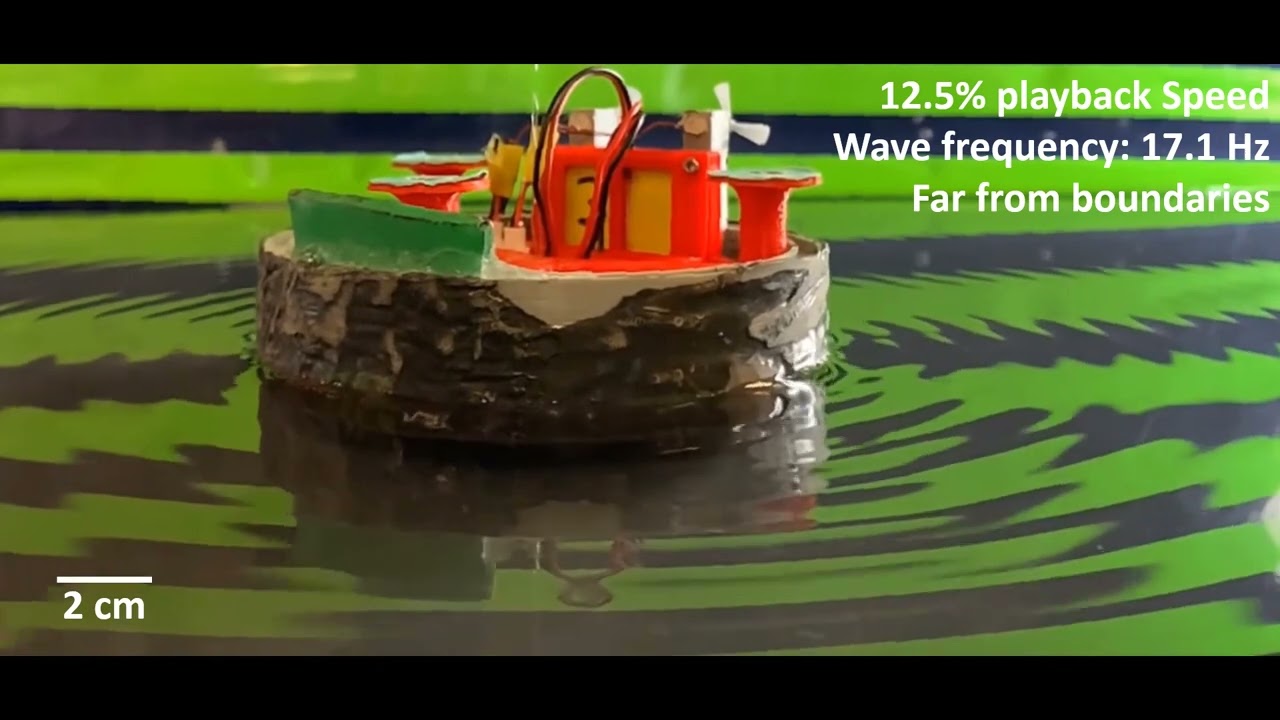
The research was led by Ph.D. student Steven W. Tarr from Georgia Institute of Technology. The team created a 3D-printed float that vibrates in the water at a controlled frequency. The resulting motion generates symmetrical waves at identical wavelengths.
An acrylic sheet reportedly served as a boundary. It was kept sufficiently far from the boat to create a one-dimensional system, implying the boat's movement perpendicular to the wall was monitored. The team observed that the boat was either attracted or repelled by the wall depending on its initial distance and the frequency of the generated water waves.
The movement of the boat was recorded using a webcam while a high-speed camera was used to view and quantify the waves created by the oscillating boat.
When close to the wall, the boat is attracted more to the wall as it moves closer and its oscillating frequency increases. At middle distances, the boat is repelled from the wall, while at larger distances, the boat remains unaffected.
In light of the minuscule acceleration, steps were taken to prevent it from being affected by elements such as viscosity, wave-induced drag on the boat, and the boat's inertia. Despite this, the forces remained below 100 micronewtons.
The locomotive phenomenon from the boat's waves occurred due to adequate energy from the reflected waves striking the boat's hull. As a result, the boat connived asymmetric waves, smaller towards the wall. This created an attractive force towards the wall.
Further from the wall, the reflected waves had too small a height to affect net wave generation, but still carried some momentum, resulting in a slight repulsive force. Far from the wall, the reflected waves had dissipated so they provided no meaningful force.
Frequency dependence arose because while the energy of the reflected wave increased with frequency, the contact of the emitted waves with the wall led to complicated dynamics at the contact line, dissipating substantial energy and modifying the amplitude of the reflected waves.
'Our study is a terrific example of the wealth of phenomena waiting to be discovered at the interface of physics and robotics,' said Daniel Goldman, a co-author and physics professor at the Georgia Institute of Technology, who calls this field 'robophysics.'
'Making and using analogies from other branches of physics (in this case, the Casimir effect in quantum field theory) can be useful in developing new approaches to robot movement analogous to our previous work on 'mechanical diffraction' in undulatory limbless systems,' Goldman concluded.
© 2024 Science X Network



